«Идеальный»
закон управления (3.45) или (3.46) не реализуем, так как параметры ОУ не
известны. Заменим идеал. коэф. регулятора (![]() )
настраиваемыми (kr, kx). Структура регулятора описывается
)
настраиваемыми (kr, kx). Структура регулятора описывается ![]() . (3.50) Подставив (3.50) в ОУ, получим
уравнение обобщенного настраиваемого объекта (ОНО)
. (3.50) Подставив (3.50) в ОУ, получим
уравнение обобщенного настраиваемого объекта (ОНО) ![]() (3.51)
(3.51)
и подставим (3.50) в (3.43), тогда
![]() (3.52)
(3.52)
Введем расширенную матрицу отклонений настраиваемых
коэф-тов от их «идеальных» значений ![]() и вектор сенсоров,
элементы которого измеряются или вычисляются на основе измерений
и вектор сенсоров,
элементы которого измеряются или вычисляются на основе измерений  , dimS = px
1, p = n + m.
, dimS = px
1, p = n + m.
Уравнение (3.52) примет вид ![]() -
уравнение системы в отклонениях.
-
уравнение системы в отклонениях.
Для исследования системы используем функцию Ляпунова вида
![]() , (3.53)
, (3.53)
где tr (.)– след
матрицы (сумма элементов главной диагонали),  .
.
В силу уравнения (3.52) определим производную функцию V (3.53)
![]() Вторая составляющая
уравнения обращается в ноль, если
Вторая составляющая
уравнения обращается в ноль, если ![]() - алгоритм адаптации в
отклонениях,
- алгоритм адаптации в
отклонениях, ![]() (3.54) Производная
исследуемой функции принимает вид
(3.54) Производная
исследуемой функции принимает вид![]() отрицательная
определенность функции следует из гурвицевости матрицы коэффициентов эталонной
модели. Матрица Н удовлетворяет уравнению Ляпунова:
отрицательная
определенность функции следует из гурвицевости матрицы коэффициентов эталонной
модели. Матрица Н удовлетворяет уравнению Ляпунова:![]() Полагая медленное изменение коэффициентов
Полагая медленное изменение коэффициентов ![]() и учитывая ранее введенные обозначения,
получим вид алгоритмов адаптации:
и учитывая ранее введенные обозначения,
получим вид алгоритмов адаптации:![]() (3.55)
(3.55)
![]()
Замечание: 1. Для реализации рассмотренного адаптивного регулятора предполагаем введение в систему: - наблюдателя состояния; - дополнительного динамического звена, формируемого желаемую траекторию системы. 2. Расчет системы проводится в предположении квазистационарности ОУ, поэтому адаптивная система не будет обладать свойством идентифицируемости (точного определения) параметров ОУ и будет обладать заданным качеством только при медленном темпе изменения параметрических возмущений. 3. В данном случае расчет проведен в системе с параметрической адаптацией, но изложенный подход позволяет определить алгоритм сигнально – параметрической адаптации.
Замечание: Приведем промежуточные вычисления, поясняющие вид уравнения (3.55),
![]()
![]()
![]()
![]()
![]()
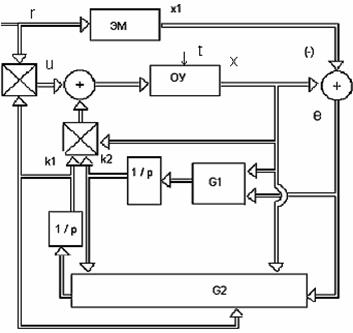
Структурная схема адаптивной системы (3.25), (3.26),
(3.46), (3.55) изображена на рисунке 3.8 . Для обозначения элементов схемы
приняты обозначения: ![]() .
.
 Условия, при которых решена поставленная задача,
являются условиями идентифицируемости
Условия, при которых решена поставленная задача,
являются условиями идентифицируемости ![]() при
при ![]() и, одновременно, условиями асимптотической
устойчивости в целом
и, одновременно, условиями асимптотической
устойчивости в целом ![]()
Замечание: Согласно описанию объекта коэффициент b0точно не известен. Поэтому в адапторе можно использовать либо bм, либо любое значение из заданного множества, которому принадлежит b0 .
Модель линейного
одноканального нестационарного объекта управления n-го порядка
описывается уравнениями вида:  (4.9) Цель функ-ния
системы состоит в стабилизации с заданным качеством выходной переменной
системы:
(4.9) Цель функ-ния
системы состоит в стабилизации с заданным качеством выходной переменной
системы: ![]() . Уравнение основного контура можно
получить методом эталонного уравнения. Полагаем, что желаемая динамика системы
описывается дифференциальным уравнением вида:
. Уравнение основного контура можно
получить методом эталонного уравнения. Полагаем, что желаемая динамика системы
описывается дифференциальным уравнением вида: ![]() (4.17)
(4.17)
где
![]() – задающее входное воздействие. Уравнение
(4.17) описывает эталонную модель. В процессе синтеза адаптивного регулятора
полного порядка используем (4.9), разрешенное отн-но старшей производной
– задающее входное воздействие. Уравнение
(4.17) описывает эталонную модель. В процессе синтеза адаптивного регулятора
полного порядка используем (4.9), разрешенное отн-но старшей производной  (4.18)
(4.18)
 Приравниваются
правые части (4.17), (4.18), полученное уравнение разрешается отн-но управ.
переменной, после чего выполняется замена неизвестных коэф-тов, также функции
Приравниваются
правые части (4.17), (4.18), полученное уравнение разрешается отн-но управ.
переменной, после чего выполняется замена неизвестных коэф-тов, также функции ![]() соответ-ми коэф-ми регулятора:
соответ-ми коэф-ми регулятора:
![]() (4.19) здесь
(4.19) здесь ![]() -
настраиваемые коэф-ты, i={0, 1,…,n-1}. Пусть коэф-ты регулятора образуют вектор
-
настраиваемые коэф-ты, i={0, 1,…,n-1}. Пусть коэф-ты регулятора образуют вектор ![]() , тогда алгоритм адаптации на основе метода
вектора скорости:
, тогда алгоритм адаптации на основе метода
вектора скорости: ![]() (4.20А)
(4.20А) ![]() (4.20В)
где
(4.20В)
где ![]() – матрица коэф-тов передачи,
– матрица коэф-тов передачи, ![]() ;
; ![]() – вспомогательные
вектор-функции. Для сходимости процессов в
системе (4.9), (4.19), (4.20А) элементы вектор-функции
– вспомогательные
вектор-функции. Для сходимости процессов в
системе (4.9), (4.19), (4.20А) элементы вектор-функции ![]() определяются
следующим образом:
определяются
следующим образом:![]() (4.21)где
(4.21)где  Таким образом, адаптивный регулятор
описывается уравнениями:
Таким образом, адаптивный регулятор
описывается уравнениями:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.