Процесс поиска продолжается до тех пор, пока ![]() ,
, ![]() ,
не станут близки к нулю или пока не будет достигнута граница области задания
переменных.
,
не станут близки к нулю или пока не будет достигнута граница области задания
переменных.
В алгоритме с автоматическим уточнением шага величину ![]() уточняют так, чтобы изменение
направления градиента
уточняют так, чтобы изменение
направления градиента ![]() в соседних точках
в соседних точках ![]() и
и ![]() улучшающей
последовательности составляло
улучшающей
последовательности составляло ![]()
![]() (рис 3.7)
(рис 3.7)
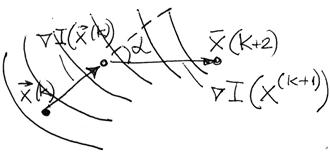
Рисунок 3.8 – Изменение направления градиента в соседних
точках
Должно быть ![]()
где
![]() – скалярное произведение векторов.
– скалярное произведение векторов.
 ;
;
 ;
;
 ;
;
Если ![]() ;
;
если ![]() ;
;
если ![]() ,
,
где
![]() .
.
Критерии окончания поиска оптимума:
![]() ;
(3.14)
;
(3.14)
 ,
,![]() ; (3.15)
; (3.15)
![]() ;
(3.16)
;
(3.16)
![]() ;
(3.17)
;
(3.17)
где
 – норма вектора.
– норма вектора.
Поиск завершается при выполнении одного из условий (3.14) – (3.17).
Недостатком градиентного поиска (так же и
рассмотренных выше методов) является то, что при его использовании можно
обнаружить только локальный экстремум функции ![]() .
Для отыскания других локальных экстремумов необходимо производить поиск из
других начальных точек.
.
Для отыскания других локальных экстремумов необходимо производить поиск из
других начальных точек.
3.2.3 Метод наискорейшего спуска
Метод наискорейшего спуска предложен американскими специалистами Дж. Боксом и К. Уилсоном как синтез лучших свойств градиентного метода и метода релаксации.
Недостатком градиентного метода заключается в том, что
на каждом шаге надо вычислять все производные функции ![]() и
определять направление градиента, что при большом числе переменных эта трудоемкая
операция. Метод релаксации в том смысле обладает определенным достоинством, так
как при движении вдоль выбранного осевого направления не требует вычислений
производных после каждого шага. Однако в данном случае движение происходит не в
оптимальном направлении, поскольку градиент в общем случае не совпадает с
осевым направлением.
и
определять направление градиента, что при большом числе переменных эта трудоемкая
операция. Метод релаксации в том смысле обладает определенным достоинством, так
как при движении вдоль выбранного осевого направления не требует вычислений
производных после каждого шага. Однако в данном случае движение происходит не в
оптимальном направлении, поскольку градиент в общем случае не совпадает с
осевым направлением.
Метод наискорейшего спуска (крутого восхождения)
сочетает основные идеи методов релаксации и градиента и заключается в следующем.
Так же как в градиентном методе, в начальной точке ![]() определяет
направление градиента и перемещается в этом (при поиске максимума) или в
противоположном (при поиске минимума) направлении. Однако перемещаются не на
один шаг, а несколько шагов (как в методе релаксации). После каждого шага
оценивается только величина критерия
определяет
направление градиента и перемещается в этом (при поиске максимума) или в
противоположном (при поиске минимума) направлении. Однако перемещаются не на
один шаг, а несколько шагов (как в методе релаксации). После каждого шага
оценивается только величина критерия ![]() , производные не
вычисляются (рис. 3.8)
, производные не
вычисляются (рис. 3.8)
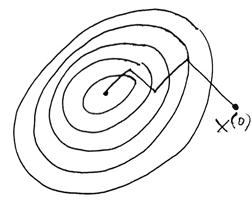
Рисунок 3.9 – Траектория движения к оптимуму в методе наискорейшего спуска
 ,
, ![]() , (3.18)
, (3.18)
где
![]() – вектор точки, в которой последний
раз вычислялся градиент
– вектор точки, в которой последний
раз вычислялся градиент ![]() .
.
В алгоритме (3.18) знак “+” – принимается при поиске
максимума, а знак “-” – при поиске минимума. В направлении градиента ![]() выполняют шаги пока выполняется
условие (при поиске минимума)
выполняют шаги пока выполняется
условие (при поиске минимума)
![]() (3.19)
(3.19)
При нарушении условия (3.19) в последней точке определяют новое направление градиента и процедуру поиска повторяют.
Критерием окончания поиска может служить одно из условий (6,14) – (6,17) градиентного спуска.
Рассмотрим возможность улучшения алгоритма поиска
Итерационный поиск (6.18) в векторной форме в точке ![]() имеет
вид
имеет
вид
![]() (3.20)
(3.20)
С учетом этого можно определить значение ![]() в точке
в точке ![]() :
:
![]() (3.21)
(3.21)
Поскольку ![]() и
и ![]() определены, то значение целевой
функции
определены, то значение целевой
функции ![]() в следующей точке
в следующей точке
![]()
оказывается функцией только одного параметра – шага спуска (рис. 6.9). Применяя какой-нибудь метод однометрической оптимизации определяем величину оптимального шага
![]()
и координаты новой точки
![]()
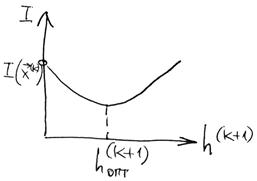
Рисунок 3.10 – Характер зависимости целевой функции от величины шага поиска
Аналогично находим:
![]()
Вычислив
в новой точке ![]() градиент
градиент ![]() , имеем
, имеем

Эта процедура повторяется до выполнения одного из условий (3.14) – (3.17)
Заметим, что центральным звеном рассматриваемого алгоритма является поиск минимума функции одной переменной, что существенно увеличивает быстродействие алгоритма поиска оптимума методом наискорейшего спуска.
Этот
метод, также как и другие методы градиентного спуска, определяет локальный
минимум функции ![]() . Это связано с
зависимостью всего пути спуска
. Это связано с
зависимостью всего пути спуска ![]() . Для определения
других локальных минимумов необходимо производить поиск из других начальных
точек.
. Для определения
других локальных минимумов необходимо производить поиск из других начальных
точек.
До сих пор рассматривались методы поиска оптимума, в
которых производился предварительный анализ производных функций цели ![]() по всем независимым переменным для
определения направления и величины шага поиска. Это связано с необходимостью
выполнения большого объёма вычислений, что приводит к увеличению времени поиска.
по всем независимым переменным для
определения направления и величины шага поиска. Это связано с необходимостью
выполнения большого объёма вычислений, что приводит к увеличению времени поиска.
Кроме того, при оптимизации объекта в условиях отсутствия его математического описания, погрешность вычисления производной как разности значений и критерия оптимальности может достигать до сотен процентов из-за неизбежных погрешностей при измерений величин, характеризующих этот критерий. Причём это может иметь место даже при небольшой относительной погрешности вычислений значения критерия оптимальности. Это может привести к существенным ошибкам в определении направления движения к оптимуму с помощью градиентных методов.
Существует другая группа методов – безградиентные методы, использующие в процессе поиска информацию, получаемую не при анализе производных, а от сравнительной оценки критерия оптимальности в результате выполнения очередного шага. К ним относятся методы сканирования, покоординатного спуска (Гаусса- Зейделя), симплекса.
3.3.1 Метод сканирования
Идея алгоритма перебора крайне проста. Вычисляют
значения функции ![]() в конечном числе точек
в конечном числе точек ![]() области Dx (в
узлах координатной сетки).Из вычисленных значений выбирают наименьшее
(наибольшее)
области Dx (в
узлах координатной сетки).Из вычисленных значений выбирают наименьшее
(наибольшее) ![]() . Координаты соответствующего узла сетки
. Координаты соответствующего узла сетки
![]() – это координаты экстремума,
определённые с точностью до
– это координаты экстремума,
определённые с точностью до ![]() , где – h шаг
сетки (рис. 6.10).
, где – h шаг
сетки (рис. 6.10).
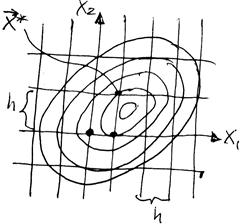
Рисунок 3.11 – Поиск оптимума на сетке переменных
Точность определения точки минимума, причем
глобального, зависит от плотности наполнения области Dx
дискретным множеством ![]() , то есть от величины шага h
координатной сетки, тем выше точность определения положения оптимума, однако
при уменьшении h быстро растёт объём вычислений. Если интервал изменения
каждой переменной разбить К равных частей, то h равно
, то есть от величины шага h
координатной сетки, тем выше точность определения положения оптимума, однако
при уменьшении h быстро растёт объём вычислений. Если интервал изменения
каждой переменной разбить К равных частей, то h равно
![]() ,
, ![]()
При этом необходимое количество вычислений I(x) равно
![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.