ω0ном – синхронная угловая скорость двигателя при номинальной частоте fном.
При частотном управлении по закону Ф1=const:
 (45)
(45)
 (46)
(46)
 (47)
(47)
![]() (48)
(48)
 (49)
(49)
где Х1ном, Х´2ном, Хμ.ном – индуктивные сопротивления схемы замещения АД при номинальной частоте;
I1ном – номинальный ток фазы статора.
Таким образом искусственные механические характеристики будут иметь следующий вид:
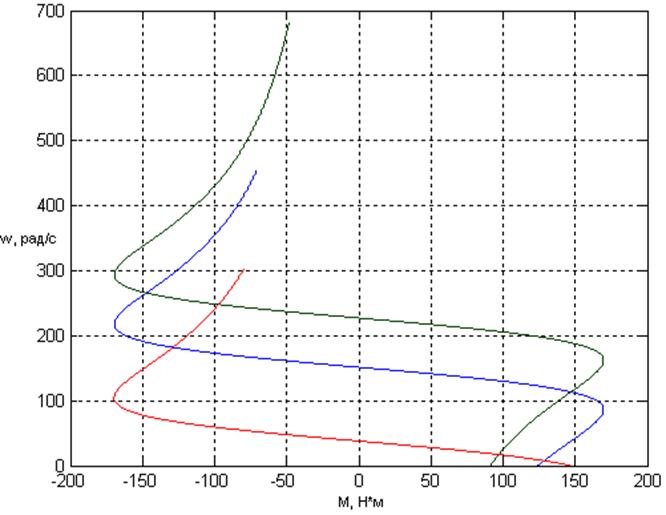
Рис.6. Искусственные механические характеристики в предполагаемых режимах работы при частотном управлении.
Торможение двигателя будет осуществляться с отдачей энергии в сеть, т.е. при уменьшении частоты рабочий режим двигателя сместится во второй квадрант(т.к. скорость мгновенно измениться не может), и пока момент меньше нуля двигатель будет отдавать энергию.
5. АНАЛИЗ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК И ТРЕБОВАНИЙ К ЭП. СИНТЕЗ СИСТЕМЫ УПРАВЛЕНИЯ ЭП. ПОСТРОЕНИЕ СТАТИЧЕСКИХ ХАРАТЕРИСТИК СУЭП.
Из статических характеристик привода насоса видно, что одним из режимов работы будет работа на пониженной скорости, которая в 8 раз меньше номинальной. Это предъявляет особые требования к ЭП: требуется обеспечить достаточную жесткость механической характеристики а также необходимую точность регулирования. Поэтому для регулирования скорости вращения насоса выберем схему частотного управления АД с обратной связью по скорости и току. Обратная связь по току обеспечит жесткость механической характеристики и быстродействие насоса, а обратная связь по скорости увеличит точность регулирования. Таким образом функциональная схема управления ЭП центробежного насоса выглядит следующим образом:
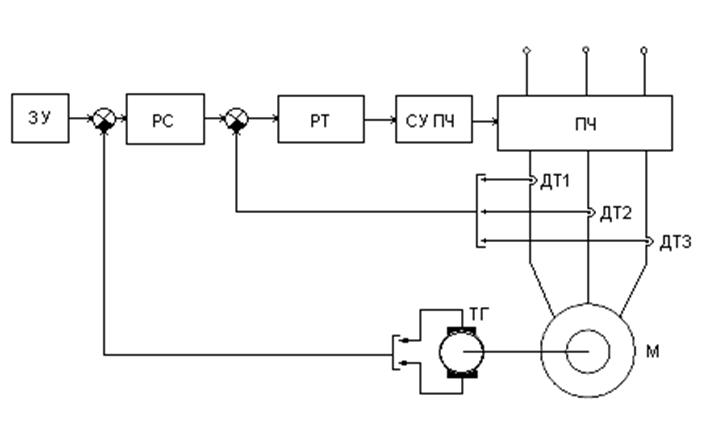
Рис.7. Функциональная схема ЭП.
Где: ЗУ- задающее устройство, РС- регулятор скорости, РТ- регулятор тока, ПЧ- преобразователь частоты, ДТ1…ДТ3- датчики тока, ТГ- тахогенератор, М- АД с КЗ.
В качестве преобразователя частоты выберем схему автономного инвертора напряжения на биполярных транзисторах с изолированным затвором. Инвертор будет модулировать поступающий на его вход постоянный сигнал и по частоте и по амплитуде. В качестве выпрямителя возьмем трехфазный мостовой выпрямитель. Тогда силовая преобразователя частоты будет выглядеть следующим образом:
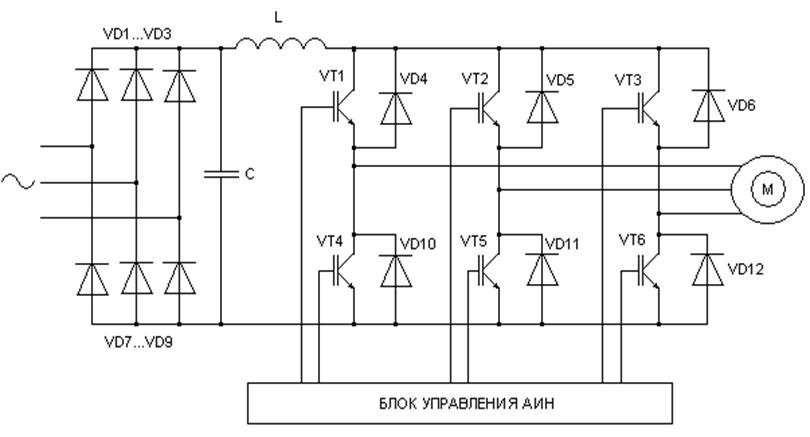
Рис.8. Схема преобразователя частоты с автономным инвертором напряжения.
Инвертор напряжения выполнен на полностью управляемых вентилях, способных включаться и выключаться в заданный момент времени при подаче на них управляющего сигнала. Периодическое включение и отключение транзисторов (переключения происходят каждую шестую часть периода выходной частоты, при этом каждый ключ замкнут половину периода выходной частоты, т.е. угол проводимости равен 180˚, и в каждый момент времени одновременно проводят ток три ключа) приводит к тому, что напряжение на нагрузке имеет прямоугольную форму с амплитудой, равной напряжению источника питания. Кривая тока в нагрузке будет состоять из отрезков экспоненты. Для обеспечения протекании тока в обоих направлениях встречно параллельно транзисторам введены диоды. Диоды оказываются открытыми, когда ток и напряжение нагрузки имеют противоположные знаки. При этом ток, потребляемый из источника, меняет свое направление. Если выпрямитель имеет одностороннюю проводимость, его необходимо зашунтировать конденсатором, который будет заряжаться, когда ток протекает от инвертора к источнику, и разряжаться, когда ток потребляется из источника.
Таким образом, основанная особенность АИН заключается в том, что напряжение на нагрузке не зависит от неё, а определяется лишь очередностью коммутации управляемых вентилей в инверторе. Это достигается введением в систему обратных диодов, для пропускания индуктивного тока нагрузки, и включением параллельно источнику конденсатора, на который этот ток замыкается.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.