В АИТ, наоборот, очередность коммутации тиристоров определяет форму тока, а форма напряжения зависит от нагрузки. Это обусловлено включением на вход инвертора реактора с достаточно большой индуктивностью.
Определившись со способом регулирования ЭП, и, синтезировав функциональную схему управления приводом, перейдем к определению передаточных функций функциональных звеньев системы и к составлению структурной схемы для моделирования.
Передаточная функция асинхронного двигателя с КЗ ротором:
 (50)
(50)
где: Тэ и Тм- электрическая и механическая постоянные двигателя
(определены в пункте 3 курсовой работы);
β – жесткость механической характеристики.
 (51)
(51)
ОС потоку и скорости рассчитываем исходя из того, что максимальный сигнал с датчика, соответствующий максимальной нагрузке, равен 10В.
Тогда:
Передаточную функцию преобразователя частоты вместе с выпрямителем можно представить так:
 (52)
(52)
где: Tn- постоянная времени коммутации для транзисторов.
В качестве регулятора тока рассчитаем ПИ- регулятор, который рассчитывается из соображения компенсации электромагнитной постоянной времени двигателя для обеспечения лучших динамических показателей:
 (53)
(53)
где:
 (54)
(54)
![]() (55)
(55)
 (56)
(56)
fНОМ- номинальная частота тока в двигателе;
wHOM- номинальная частота вращения двигателя;
sHOM- номинальное скольжение.
Схемная реализация регулятора тока на операционном усилителе будет выглядеть следующим образом:
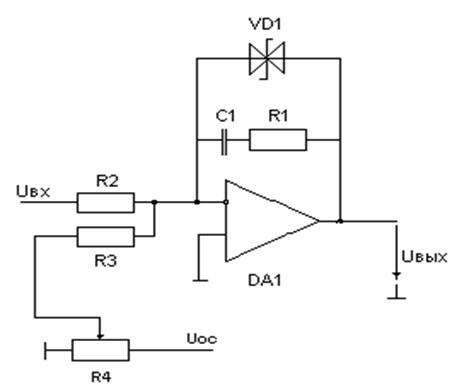
Рис.9. Принципиальная схема регулятора тока.
Данный регулятор одновременно является и сумматором, суммируя сигнал обратной связи по току и выход регулятора скорости, который является заданием для регулятора тока. Для рассчитанных настроек регулятора определим номиналы элементов в регуляторе тока. Коэффициент усиления регулятора:
 (57)
(57)
Выбираем из ряда сопротивлений следующие резисторы: R1=24кОм, R2=R3=11кОм.
Время интегрирования:
![]() (58)
(58)
Тогда С1=1.1мкФ.
Резистор R4 служит для подстройки параметров ПИ- регулятора. Двуханодный стабилитрон служит для ограничения регулирующего воздействия в пределах 10В.
В качестве регулятора скорости также возьмем ПИ- регулятор, который обеспечивает точность регулирования скорости в статическом режиме. Передаточная функция регулятора скорости:
 (59)
(59)
где:
 (60)
(60)
Принципиальная схема регулятора скорости будет аналогична схеме регулятора тока. Только заданием для регулятора скорости служит выход задатчика интенсивности, а вместо Uoc по току подается сигнал обратной связи по скорости. Рассчитаем номиналы элементов в регуляторе скорости. Коэффициент пропорциональности регулятора скорости:
Время интегрирования:
![]()
Тогда номиналы элементов выберем следующие: R1=430кОм, R2=R3=160кОм, C1=160мкФ.
Схема задающего устройства будет выглядеть следующим образом:
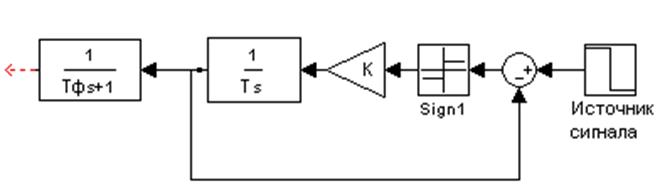
Рис.10. Структурная схема задающего устройства.
где: Тф- постоянная времени фильтра. Рассчитывается исходя из того, что она должна быть равна от 0.1 до 0.05 времени переходного процесса.
Для нашего случая выбираем Тф=0.1
T- время разгона двигателя до номинальной частоты вращения. Т=2с.
K- максимальное напряжение на выходе источника сигнала задания. Для нашего случая К=13.
Схемная реализация задачтика интенсивности будет выглядеть следующим образом:
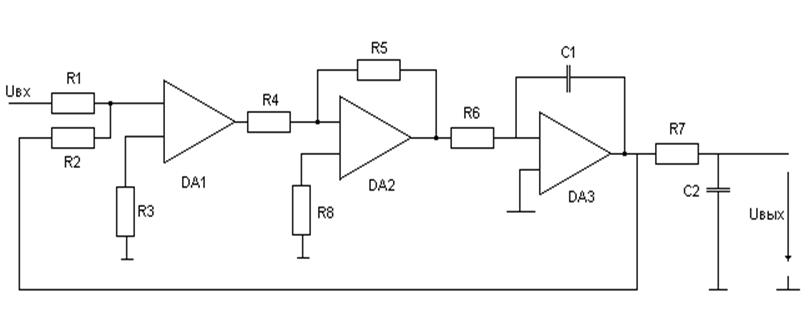
Рис.11. Принципиальная схема задатчика интенсивности
Где номиналы элементов в соответствии со значениями параметров системы регулирования рассчитываются по следующим формулам:
 (61)
(61)
![]() (62)
(62)
![]() (63)
(63)
Исходя из данных формул и в соответствии со значениями номинального ряда напряжений, выбираем: R5=13кОм, R4=1кОм, R6=200кОм, C1=10мкФ, R7=100кОм, С2=1мкФ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.