λm – допустимый коэффициент перегрузки двигателя по моменту.
![]() Н*м.
Н*м.
Мс.мах=28.98 Н*м.
Таким образом, двигатель также удовлетворяет условиям перегрузки с учетом падения питающего напряжения в сети на 10%. В обоих случаях проверки по нагреву и перегрузочной способности показатели более чем на 15% лучше минимально необходимых.
Проверка выбранного двигателя по пусковым условиям производится в соответствии со следующим условием:
![]() (16)
(16)
где Мс.мах – максимальное значение статического момента на валу двигателя
при пуске;
λп –кратность пускового момента двигателя;
Мном – номинальный момент двигателя.
Из справочных данных двигателя λп=2.8, тогда λп*Мном=105 Н*м, что также намного больше максимального статического момента на валу двигателя.
4. Расчет недостающих параметров двигателя. Построение механических характеристик машины в предполагаемых режимах работы.
Рассчитываем пусковой ток:
![]() (17)
(17)
где: λI – кратность пускового тока.
Полное сопротивление короткого замыкания, Ом
 Ом (18)
Ом (18)
где: λI – кратность пускового тока.
Номинальный момент на валу двигателя, Н*м:
 (19)
(19)
Пусковой момент на валу, Н*м:
![]() (20)
(20)
Приведенное активное сопротивление фазы ротора, Ом:
 (21)
(21)
где:  (22)
(22)
nо – скорость идеального холостого хода, об/мин.
Активное сопротивление фазы статора
![]() (23)
(23)
где cosφпуск – коэффициент мощности при пуске
 (24)
(24)

где γ1 – отношение мощности потерь мощности в обмотке статора при номинальной нагрузке к полным номинальным потерям,
 . (25)
. (25)
Примем γ1=0.3.
 (26)
(26)
Индуктивное сопротивление короткого замыкания, Ом
 (27)
(27)
Индуктивные сопротивления рассеяния статора и ротора примерно равны:
 (28)
(28)
Ток холостого хода асинхронного короткозамкнутого двигателя:
 (29)
(29)
где sк – критическое скольжение, которое можно определить по формуле
 (30)
(30)
 (31)
(31)
λm,λп – кратность максимального и пускового моментов.
Рассчитываем индуктивное сопротивление намагничивающего контура Хμ:
 (32)
(32)
где:
 (33)
(33)
где: ΔР0 – потери мощности при холостом ходе, Вт
 (34)
(34)
 (35)
(35)
Активное сопротивление намагничивающего контура
 (36)
(36)
где ∆Рсm – потери в стали статора, Вт
 (37)
(37)
Электромагнитная постоянная времени АД, с
 (39)
(39)
Имея параметры электропривода, приступают к расчету и построению статических электромеханических и механических характеристик, которые обеспечивают требуемые режимы работы на каждом интервале нагрузочной и скоростной диаграмм.
Для асинхронных короткозамкнутых двигателей, параметры которых изменяются при пуске, формулой (6.90) можно пользоваться только для скольжений s<sк. В области скольжений 1≥s>sк удовлетворительные результаты дает формула К.А. Чекунова
 (40)
(40)
 (41)
(41)
где λп, λт – соответственно кратности пускового
и максимального моментов (42)
(42)
Строим в пакете МathLab естественную характеристику двигателя по формуле чекунова:
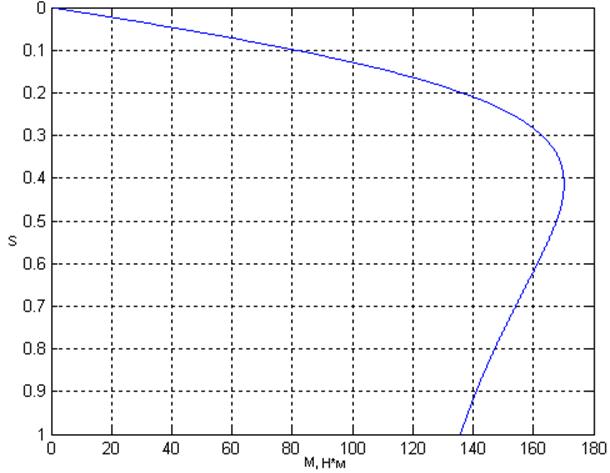
Рис.5. Естественная механическая характеристика двигателя с КЗ ротором.
При реализации частотного управления будем руководствоваться тем, что Ф1=const. При таком управлении механическая характеристика будет выглядеть следующим образом:
 (43)
(43)
где Мк – критический момент, зависящий от закона частотного управления;
sак – критическое значение параметра абсолютного скольжения, зависящее от закона частотного управления;
α, ν – соответственно относительные частота и угловая скорость:
 ;
;
 ; (44)
; (44)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.