Исследуя статизм синтезированной системы ЭП можно сделать вывод, что, т.к. в канале главной ошибки системы управления ЭП стоит астатическое звено - ПИ-регулятор скорости, то САУ ЭП обладает статизмом равным 0. Т.е. статические характеристики разработанной системы являются абсолютно жёсткими. Вид статических характеристик СУЭП показан на следующем рисунке:
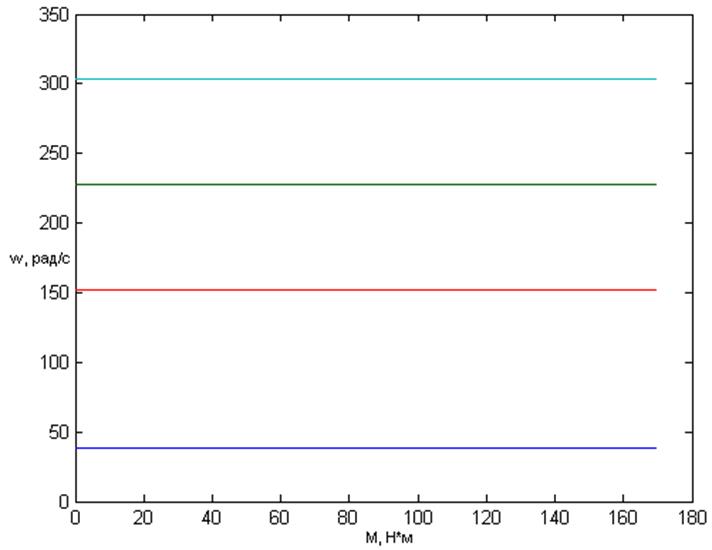
Рис.12. Статические характеристики СУЭП.
6. СОСТАВЛЕНИЕ СТРУКТУРНОЙ СХЕМЫ СИСТЕМЫ РЕГУЛИРОВАНИЯ. МОДЕЛИРОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ ЭП ЗА ЦИКЛ РАБОТЫ. ОПРЕДЕЛЕНИЕ ОСНОВНЫХ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ.
На основании данных 5-ого раздела курсовой работы (рассчитанных настройках регуляторов и передаточных функций всех звеньев ЭП) построим структурную схему ЭП (см. приложение 2).
Теперь промоделируем переходные процессы ЭП за цикл работы. Т.е. построим графики изменения скорости вращения ротора двигателя, статического и электрического моментов.
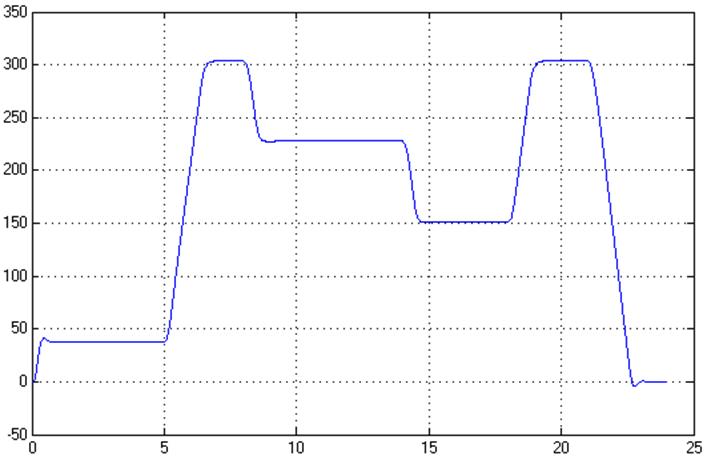
Рис.13. Скоростная диаграмма механизма за цикл работы.
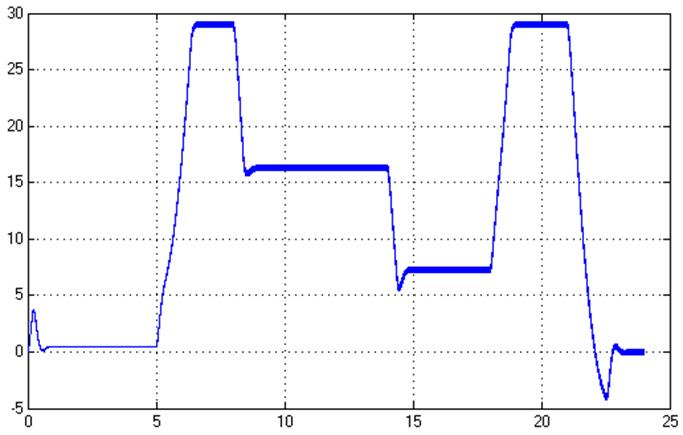
Рис.14. График изменения электрического момента на протяжении цикла работы ЭП.
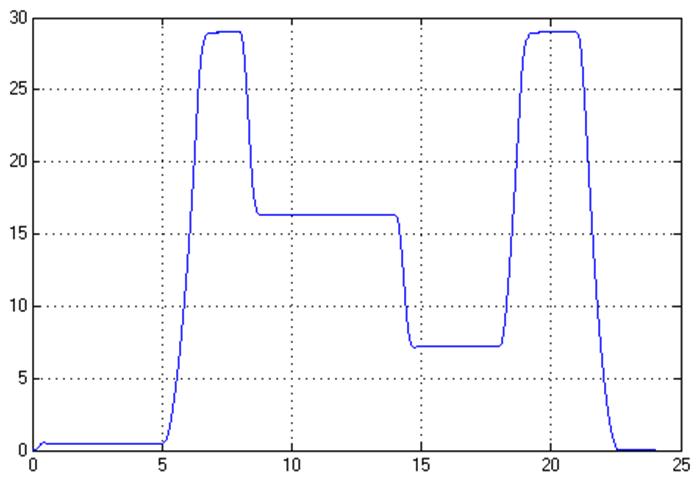
Рис.15. График изменения статического момента ЭП за цикл работы.
Теперь на основании структурной схемы ЭП в приложении 1 синтезируем схему для вычисления энергетических показателей привода насоса. КПД привода найдем из следующего соотношения:
 ()
()
![]() (64)
(64)
где: Рпол- полезная мощность требуемая для поддержания необходимого расхода;
![]() Р- потери энергии;
Р- потери энергии;
М- текущий момент на валу двигателя;
![]() - текущая скорость
вращения ротора.
- текущая скорость
вращения ротора.
 (65)
(65)
 (66)
(66)
 (67)
(67)
![]() (68)
(68)
 (69)
(69)
где: S- полная мощность;
Р- активная мощность.
При этом значения полной
мощности, потерь, полезной мощности мы будем вычислять интегрально за цикл
работы. Структурная схема расчёта энергетических показателей приведена в
приложении 3. На ней элемент Display показывает
потери энергии за цикл регулирования, Display1 КПД
электропривода, Display2 – ![]() .
.
7. РАСЧЕТ И ВЫБОР ОСНОВНЫХ ЭЛЕМЕНТОВ ЭП.
Выбор и расчет анодного реактора.
Емкость требуемого анодного реактора рассчитывается по следующей формуле:
 (70)
(70)
где: Iуд- ударный неповторяющийся ток с открытом состоянии 2.75*10³А.
Тогда:
Из справочника выбираем следующие анодные реакторы: РТСТ-41-0,76 c номинальным током 41А, номинальной фазной индуктивностью L=0,76 мГн и активным сопротивлением обмоток R=70.8Ом.
Выбор и расчет датчика скорости.
В данной системе ЭП скорость вращения ротора двигателя измерялась с помощью тахогенератора. Из электротехнического справочника выбираем тахогенератор АТ-261 со следующими техническими данными:
Частота вращения 3000 обр/мин
Напряжение возбуждения 110В
Ток возбуждения 0,35А
Крутизна Uвых 4,8÷5,8 мВмин/обр
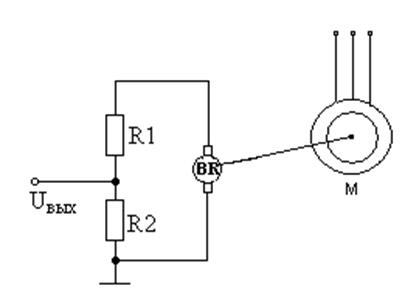
Структурная схема датчика скорости представлена на (рис. 15). Схема датчика представлена на рис.16.
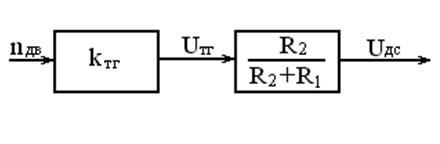
Рис.16. Структурная схема датчика скорости.
Порядок расчета датчика следующий.
Рассчитывают напряжение на выходе тахогенератора при работе двигателя постоянного тока с частой, равной частоте вращения при идеальном холостом ходе, В:
![]() (71)
(71)
Рассчитывают делитель напряжения: входное напряжение делителя Uвх=Uтг, В, а выходное напряжение – Uвых=Uз.скор. мах:
.
 (72)
(72)
где Uз.скор. мах – максимальное напряжение задания скорости в САУ.
|
Выбирают из справочника резисторы, а затем уточняют значение выходного напряжения датчика скорости по формуле
 (73)
(73)
Рассчитаем напряжения:
Входное напряжение делителя
Выбираем из справочника резисторы МЛТ-0.1-3.6Ом и МЛТ-0.1-2.7Ом.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.