Кроме того, мы будем рассматривать идеализированную машину, приняв ряд основных допущений:
Уравнения, описывающие работу и переходные процессы СМ можно значительно упростить, если использовать специальную систему координат (0,d,q), оси которой строго совмещены с продольным и поперечным направлениями вращающегося ротора машины.
1 Отсутствует насыщение магнитопроводов (это наиболее сильное и далёкое от истины допущение). Однако оно позволяет использовать метод наложения процессов и, как следствие этого, использовать теорию двух реакций (по продольной и поперечной осям машины), являющейся основой для записи уравнений.
2 Распределение кривых индукции магнитного поля в воздушном зазоре синусоидально.
3 Обмотки ротора и его магнитная система симметричны относительно осей q и d. Обмотка статора симметрична относительно осей a, d, c.
4 Существуют единый для всех эквивалентных контуров СМ магнитный поток взаимной индукции и независимые от него и друг друга потоки рассеяния каждого из контуров.
Тогда СМ машину можно изобразить так, как это показано на рис. 5.1.
Рис. 5.1. Принципиальная схема СМ
Ротор вращается против часовой стрелки с угловой частотой ω. Магнитное поле, образованное трёхфазной системой токов, протекающих в неподвижных контурах статора (рис.5.2) также вращается в воздушном зазоре с той же частотой ω (в установившихся режимах ω = ωс = 314,159 рад/с).
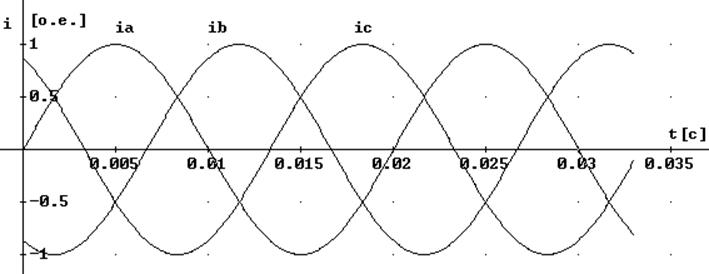
Рис. 5.2. Трёхфазная система статорных токов
Ротор и вращающееся поле статора в установившемся режиме работы СМ неподвижны друг относительно друга, т.е. вращаются синхронно. Это и дало возможность определить данный класс электрических машин как синхронные машины. Это эе обстоятельство сделало весьма эффективным использование совмещённой с ротором, т.е. вращающееся с синхронной скоростью координатной системы d-q. Наблюдатель, условно помещённый на ротор, в установившемся режиме СМ машины будет воспринимать все переменные, характеризующие процессы в статоре, как постоянные величины.
Использование координатной системы q-d предполагает замену трёх физических контуров статора СМ (a, b, c) двумя эквивалентными (q, d). Контуры d и q вращаются вместе с координатной системой q-d, поэтому параметры СМ, оцениваемые в координатной системе q-d, есть величины постоянные, и токи Iq и Id в установившихся режимах работы постоянны.
Переход от координатной системы аbc
к координатной системе 0qd
На рис.5.3 приведена неподвижная система координат abc. Изображающий вектор тока I вращается против часовой стрелки и его проекции на оси фаз образуют систему фазных токов ia, ib, ic. Положение изображающего вектора определяется углом τ, который отсчитывается от направления оси фазы a. Координатная система q-d вращается в том же направлении. Её положение определяется углом γ. Очевидно, что
i = │I│;
iq = i cos(τ – γ);
id = i sin(τ – γ);
Введём переменную ρ = 2 π/3, тогда соотношение между проекциями изображающего вектора тока на оси q,d и фазными токами можно записать в виде:
ia = i0 + iq cosγ – id sinγ, (из векторной диаграммы на рис.5.2)
по аналогии:
ib = i0 + iq cos(γ – ρ) – id sin(γ – ρ), (5.1)
ic = i0 + iq cos(γ + ρ) – id sin(γ + ρ);
Этот переход, а также обратный переход от осей 0qd к осям abc можно записать изящнее, используя матрицы преобразований:
1 cosγ -sinγ
Sqa = 1 cos(γ – ρ) -sin(γ – ρ) - преобразование Блонделя (5.2)
1 cos(γ + ρ) -sin(γ + ρ)
1/3 1/3 1/3
Caq = 2/3*cosγ 2/3*cos(γ – ρ) 2/3*сos(γ + ρ) (5.3)
2/3*sinγ 2/3*sin(γ – ρ) 2/3*sin(γ + ρ)
Iabc = Sqa I0qd; (5.4)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.