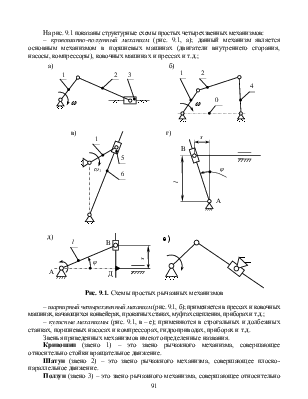




















На рис. 9.1 показаны структурные схемы простых четырехзвенных механизмов:
– кривошипно-ползунный механизм (рис. 9.1, а); данный механизм является основным механизмом в поршневых машинах (двигатели внутреннего сгорания, насосы, компрессоры), ковочных машинах и прессах и т.д.;
|
|
|
|
|
|
|
|
|
Рис. 9.1. Схемы простых рычажных механизмов
– шарнирный четырехзвенный механизм (рис. 9.1, б); применяется в прессах и ковочных машинах, качающихся конвейерах, прокатных станах, муфтах сцепления, приборах и т.д.;
– кулисные механизмы (рис. 9.1, в – е); применяются в строгальных и долбежных станках, поршневых насосах и компрессорах, гидроприводах, приборах и т.д.
Звенья приведенных механизмов имеют определенные названия.
Кривошип (звено 1) – это звено рычажного механизма, совершающее относительно стойки вращательное движение.
Шатун (звено 2) – это звено рычажного механизма, совершающее плоско-параллельное движение.
Ползун (звено 3) – это звено рычажного механизма, совершающее относительно стойки поступательное движение.
Коромысло (звено 4) – это звено рычажного механизма, совершающее относительно стойки качательное движение.
Камень (звено 5) – это звено рычажного механизма, перемещающееся в направляющих кулисы.
Кулиса (звено 6) – это подвижное звено рычажного механизма с направляющими.
В зависимости от размеров звеньев из четырехзвенного механизма, изображенного на рис. 9.1, б, можно получить следующие виды механизмов:
– кривошипно-коромысловый;
– двухкривошипный;
– двухкоромысловый.
Для получения кривошипно-коромыслового механизма необходимо выполнить условия существования кривошипа:
– кривошип является наименьшим звеном механизма;
– сумма длин наименьшего и наибольшего звеньев меньше суммы дли двух других звеньев, например, звено 1 является наименьшим, тогда
![]() .
.
Если стойка 0 является наименьшим звеном, то звено 4 будет совершать не качательное движение, а вращательное. В данном случае механизм будет называться двухкривошипным.
Если звенья 1 и 4 будут совершать качательное движение, то механизм в данном случае будет назваться двухкоромысловым.
Кулисный механизм, изображенный на рис. 9.1, г, также называется тангенсным механизмом, поскольку положение шарнира В относительно неподвижного шарнира А изменяется по закону тангенса:
![]() .
.
Кулисный механизм, изображенный на рис. 9.1, д, называется синусным механизмом, поскольку положение шарнира В относительно неподвижного шарнира А изменяется по закону синуса:
![]() .
.
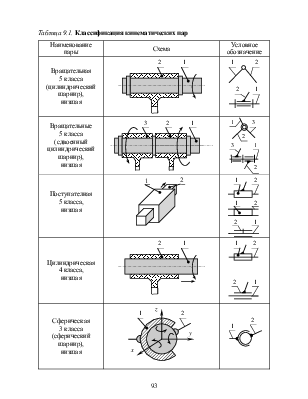
9.1.2. Классификация кинематических пар
Кинематические пары (табл. 9.1) классифицируют по следующим признакам:
– по числу степеней свободы в относительном движении звеньев (классификация Артоболевского);
– по характеру соприкосновения звеньев (классификация Релло).
По характеру соприкосновения звеньев различают низшие и высшие кинематические пары. Пару называют низшей, если элементы звеньев соприкасаются только по поверхности. Пару называют высшей, если элементы звеньев соприкасаются по линии или в точках.
Основным преимуществом низших кинематических пар по сравнению с высшими парами – возможность больших нагрузок вследствие больших площадей соприкосновения. Применение высших пар позволяет уменьшить трение в машинах (например, применение подшипников качения) и получить необходимые законы движения выходного звена механизма приданием определенной формы элементам звеньев, образующих высшую пару.
Таблица 9.1. Классификация кинематических пар
|
Наименование пары |
Схема |
Условное обозначение |
|
Вращательная 5 класса (цилиндрический шарнир), низшая |
|
|
|
Вращательные 5 класса (сдвоенный цилиндрический шарнир), низшая |
|
|
|
Поступателная 5 класса, низшая |
|
|
|
Цилиндрическая 4 класса, низшая |
|
|
|
Сферическая 3 класса (сферический шарнир), низшая |
|
|
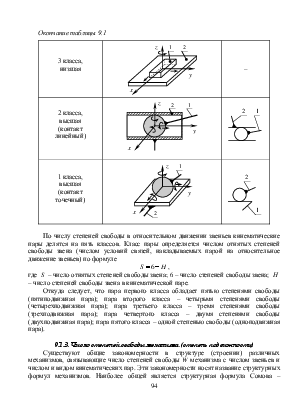
Окончание таблицы 9.1
|
3 класса, низшая |
|
– |
|
2 класса, высшая (контакт линейный) |
|
|
|
1 класса, высшая (контакт точечный) |
|
|
По числу степеней свободы в относительном движении звеньев кинематические пары делятся на пять классов. Класс пары определяется числом отнятых степеней свободы звена (числом условий связей, накладываемых парой на относительное движение звеньев) по формуле
![]() ,
,
где
![]() – число отнятых степеней свободы звена; 6
– число степеней свободы звена;
– число отнятых степеней свободы звена; 6
– число степеней свободы звена; ![]() – число степеней
свободы звена в кинематической паре.
– число степеней
свободы звена в кинематической паре.
Откуда следует, что пара первого класса обладает пятью степенями свободы (пятиподвижная пара); пара второго класса – четырьмя степенями свободы (четырехподвижная пара); пара третьего класса – тремя степенями свободы (трехподвижная пара); пара четвертого класса – двумя степенями свободы (двухподвижная пара); пара пятого класса – одной степенью свободы (одноподвижная пара).
9.1.3. Число степеней свободы механизма (степень подвижности)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.