3.7
Изменить начальные условия в объекте (![]()
![]() ), получить вид y(t),
), получить вид y(t), ![]() (t),
(t),
![]() (t),
(t), ![]() (t), u
(t).
Моделирование провести для различных значений g. Сравнить с
результатами п.3.5. Изобразить зависимость γ от x1(0) при γ r = 0.001 иx2(0)= 0.
(t), u
(t).
Моделирование провести для различных значений g. Сравнить с
результатами п.3.5. Изобразить зависимость γ от x1(0) при γ r = 0.001 иx2(0)= 0.
3.8
Изменить модель объекта управления (рисунок 1.2), ![]() ,
, ![]() . Провести моделирование адаптивной системы
при нулевых начальных условиях, кроме
. Провести моделирование адаптивной системы
при нулевых начальных условиях, кроме ![]() (0),
(0), ![]() (0) = 1, и различных значениях
(0) = 1, и различных значениях ![]() ,
, ![]() : а)
: а) ![]() =1,
=1, ![]() =1, б)
=1, б)
![]() =1,
=1, ![]() =10, в)
=10, в)
![]() =10,
=10, ![]() =1. Для
улучшения процессов в системе изменить значения γ в 10 раз. Сравнить с результатами
п.3.5.
=1. Для
улучшения процессов в системе изменить значения γ в 10 раз. Сравнить с результатами
п.3.5.
3.9 Рассчитать параметры наблюдателя. Собрать схему системы с наблюдателем
(рисунок 1.4). Повторить пп. 3.4, 3.8.
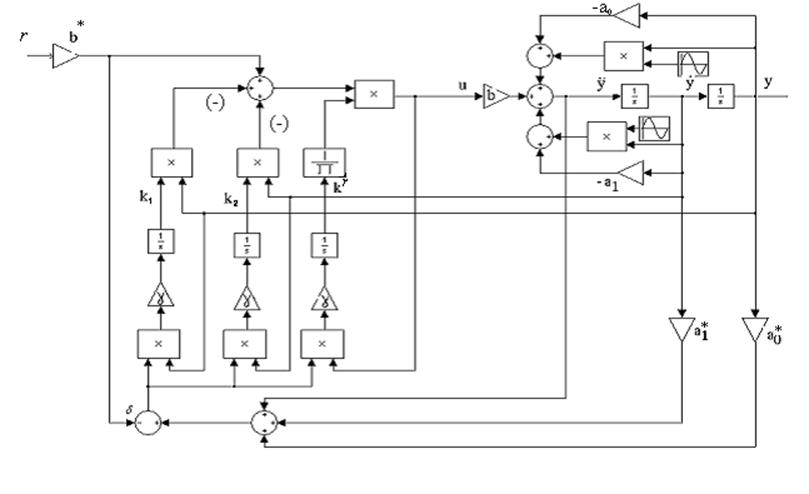
Рисунок 1.3
|
N |
|
|
b |
|
|
|
1 |
2 |
3 |
2 |
0 |
2 |
|
2 |
1 |
4 |
1 |
10 |
4 |
|
3 |
4 |
2 |
4 |
20 |
5 |
|
4 |
4 |
1 |
4 |
0 |
4 |
|
5 |
0,1 |
0,5 |
0,1 |
30 |
10 |
|
6 |
2 |
10 |
2 |
0 |
2 |
|
7 |
10 |
2 |
10 |
0 |
5 |
|
8 |
0.5 |
1.5 |
0.5 |
5 |
3 |
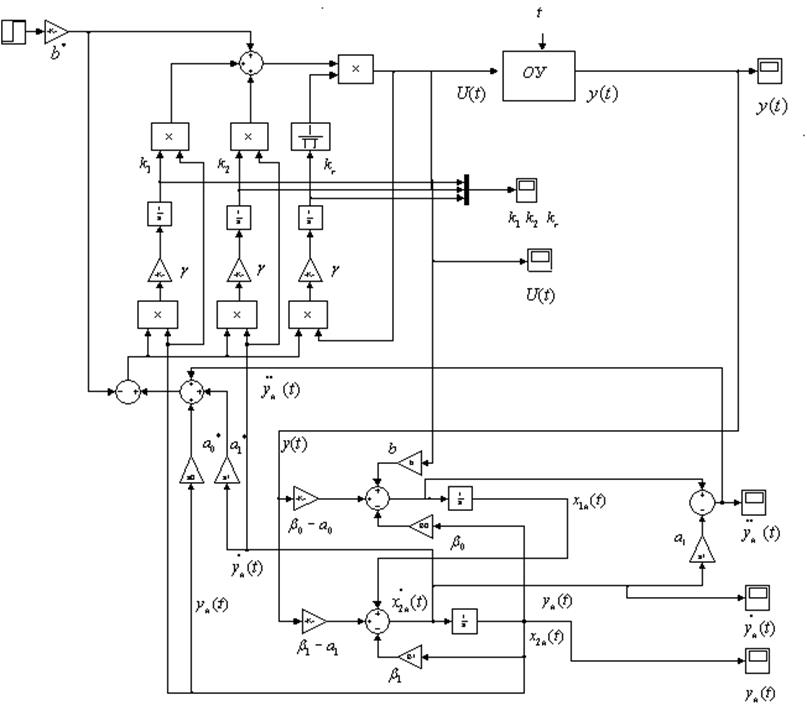
Рисунок 1.4
4. Содержание отчета
4.1 Цель работы.
4.2 Исходные данные.
4.4 Структурная схема адаптивной системы.
4.5 Расчет параметров адаптивного регулятора и наблюдателя.
4.6 Уравнения адаптивной системы с наблюдателем и вычисленными значениями параметров.
4.7 Графики процессов пп. 3.2 – 3.10, график зависимости umaxот a.
4.8 Выводы по работе.
5. Контрольные вопросы
5.1 Классификация адаптивных систем.
5.2 Виды эталонных моделей, способы реализации.
5.3 Блок-схемы беспоисковых систем с моделью.
5.4 Основные блоки системы с градиентным алгоритмом адаптации.
5.5 Влияние начальных условий в адапторе на свойства системы.
5.6 Уравнение адаптивного закона управления.
5.7 Влияние темпа параметрических возмущений на свойства системы.
5.8 Расчет асимптотического наблюдателя.
5.9 Определение вида алгоритма адаптации, использованного в лабораторной работе.
Лабораторная работа №2
система с пропорционально-интегральным алгоритмом изменения коэффициентов регулятора, синтезированным методом скоростного градиента
Цель работы: исследование свойств системы стабилизации, в которой коэффициенты регулятора изменяются по алгоритму скоростного градиента в конечно-дифференциальной форме.
1. Основные сведения
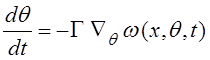
Суть метода скоростного градиента заключается в следующем: настройка параметров осуществляется в направлении, противоположном скорости изменения целевого функционала вдоль траектории обобщенного настраиваемого объекта (ОНО). Алгоритмом скоростного градиента называется правило изменения вектора настраиваемых коэффициентов (q), задаваемое уравнением вида
 (2.1)
(2.1)
где Ñ- дифференциальный оператор, Г = Г Т > 0 – квадратная матрица коэффициентов передачи,

здесь Q(.) – целевой функционал, f (x,q,t) – вектор- функция, описывающая ОНО,
![]()
y (.) – некоторая вектор-функция, удовлетворяющая условию псевдоградиентности
![]()
АСГ вида (2.1) называют алгоритмом в конечно-дифференциальной форме. Частным случаем (2.1) являются алгоритмы в дифференциальной форме (в случае y = 0)
 (2.2)
(2.2)
и в конечной форме (для Г = 0)
![]() ,
,
где g - шаг дискретизации.
Рассмотрим пример синтеза системы с параметрической адаптацией. Объект управления задан моделью в пространстве состояний
![]() (2.3)
(2.3)
где xÎRn , uÎRm – векторы состояния и входа ОУ, А, B – неизвестные матрицы коэффициентов.
Эталонная модель выбрана в форме
![]() (2.4)
(2.4)
где rÎRm– задающее воздействие, Ам – гурвицева матрица.
Цель управления сформирована относительно координатного рассогласования
![]() (2.5)
(2.5)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.