Самоотключение электроустановок при глубоком снижении напряжения учитывается упрощенно: однократным и без выдержки времени уменьшением нагрузки на величину Ксам [о.е.] при снижении напряжения в узле U ниже Uсам. Предпологается, что состав отключаемой нагрузки таков же, как и для исходной нагрузки. При самоотключениях нагрузки РСТ.норм, QСТ.норм и SАД.норм умножаются на величину (1-Kсам).
Примечание: отключение части синхронных двигателей в узле необходимо производить при помощи автоматики.
Если необходимо учесть отличия в составе нагрузки, самоотключающейся при снижении напряжения или отключаемой от противоаварийной автоматики, то рассматриваемую нагрузку следует представить в виде двух или нескольких узлов нагрузки.
2.1.5. Асинхронный двигатель.
Уравнения асинхронного двигателя (АД) основаны на следующих основных допущениях:
· не учитываются электромагнитные переходные процессы; при этом, асинхронный момент зависит от величины квадрата модуля напряжения и величины скольжения s, но не зависит от величины ds/dt,
· уравнение АД соответствует Г-образной схеме замещения без учета активного сопротивления цепи статора,
· вытеснение тока в роторе и насыщение главной магнитной цепи описываются упрощенно.
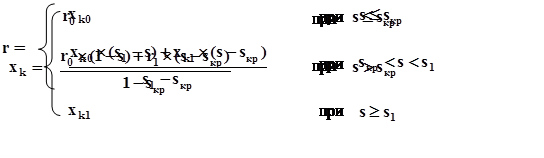
Уравнения асинхронного двигателя:
 |
где:
P, Qмощности двигателя [о.е.], за базисную мощность принято значение SАД.ном,
 |
Uисх напряжение в узле нагрузки в исходном установившемся режиме,
TJ постоянная времени инерции АД [с], величина TJ отнесена к SАД.ном,
Примечание: все параметры АД задаются в отн. ед. кроме TJ.
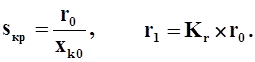
Скольжение двигателя s в исходном режиме вычисляется по формуле:
 |
 |
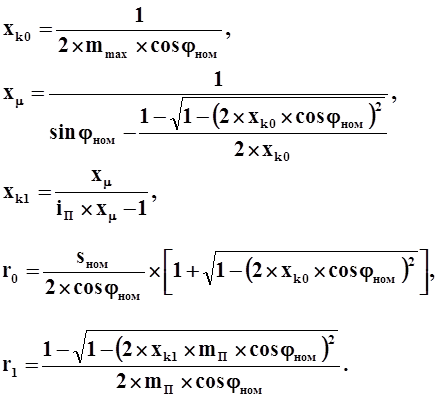 Задаются каталожные параметры асинхронного
двигателя. Переход к параметрам схемы замещения осуществляется по следующим
формулам:
Задаются каталожные параметры асинхронного
двигателя. Переход к параметрам схемы замещения осуществляется по следующим
формулам:
где каталожные параметры:
mmax кратность максимального (опрокидывающего) момента по отношению к номинальному,
mП кратность пускового момента по отношению к номинальному,
iП кратность пускового тока по отношению к номинальному,
sном номинальное скольжение.
2.1.6. Статические характеристики нагрузки.
 |
 |
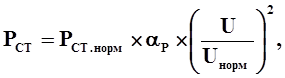
где коэффициенты αР и αQ определяются условием безразрывности статических характеристик нагрузок при U = Uкр.
 Коэффициенты а0,
а1, а2, а3, в0, в1, в2,
в3 для конкретных СХН задаются в исходных данных.
В случае применения обобщённых СХН коэффициенты в0, в1,
в2 и в3 программно вычисляются по выражениям:
Коэффициенты а0,
а1, а2, а3, в0, в1, в2,
в3 для конкретных СХН задаются в исходных данных.
В случае применения обобщённых СХН коэффициенты в0, в1,
в2 и в3 программно вычисляются по выражениям:
где:
 при этом коэффициенты b0, b1, b2 и b3 задаются в
исходных данных для СХН на месте коэффициентов в0, в1,
в2 и в3; признаком обобщенных СХН
служит номер от 25 до 30, включительно.
при этом коэффициенты b0, b1, b2 и b3 задаются в
исходных данных для СХН на месте коэффициентов в0, в1,
в2 и в3; признаком обобщенных СХН
служит номер от 25 до 30, включительно.
Если исходный режим рассматривается как кратковременно существующий или, если значения РCT.норм и QCT.норм соответствуют данным контрольных замеров в конкретном режиме, то значения UCT.норм задаются и остаются неизменными при переходе от расчета исходного режима к расчету переходного процесса.
Если исходный режим рассматривается как длительно существующий (нормальный режим, в котором заданы мощности нагрузок, соответствующие посчитанным напряжениям), то в расчете исходного режима принимаются РCT=const=РCT.норм, QCT=const=QCT.норм, а при переходе к расчету переходного процесса значения UCT.норм принимаются равными UИР (при помощи возможности корректировки стационарного режима UТЕК → Uноpм).
2.1.7. Противоаварийная автоматика.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.