Uдоп.1 дополнительный сигнал, позволяющий обеспечить специфическое воздействие на работу АРВ (от противоаварийной автоматики, или при моделировании неправильной работы АРВ); управление величиной Uдоп.1 осуществляется дискретно: значение Uдоп.1, введенное по правилам моделирования противоаварийной автоматики, сохраняется до нового управления;
![]() Eqe0 э.д.с.
возбуждения в исходном режиме:
Eqe0 э.д.с.
возбуждения в исходном режиме:
uPВmin, uРВmaxограничения входного сигнала ΔuРВ на АРВ.
где:
TРВпостоянная времени, собственно, регулятора возбуждения,
ΔuP выходной сигнал АРВ.
![]()
где:
KI, Kif коэффициенты регулирования,
ΔUf сигнал на форсировку и расфорсировку возбуждения:
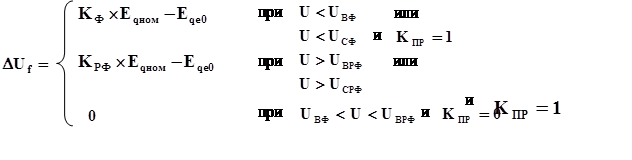 |
КПР признак ввода форсировки или расфорсировки возбуждения (КПР=1) или отсутствия ввода форсировки или расфорсировки возбуждения (КПР=0),
UВФ напряжение ввода форсировки возбуждения,
UСФ напряжение снятия форсировки возбуждения,
UВРФ напряжение ввода расфорсировки возбуждения,
UСРФ напряжение снятия расфорсировки возбуждения,
 |
КРФ кратность сигнала на расфорсировку возбуждения,
Uдоп.2 дополнительнй входной сигнал (аналогично Uдоп.1).
![]()
где:
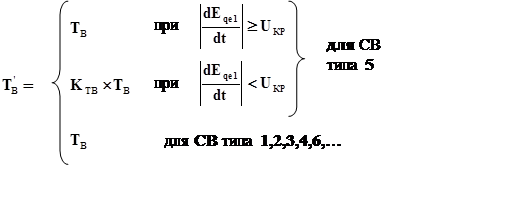
ТВ постоянная времени СВ,
 КТВ кратность
увеличения постоянной времени СВ при действии БСС,
КТВ кратность
увеличения постоянной времени СВ при действии БСС,
UКР наименьшее значение при котором блокируется действие БСС,
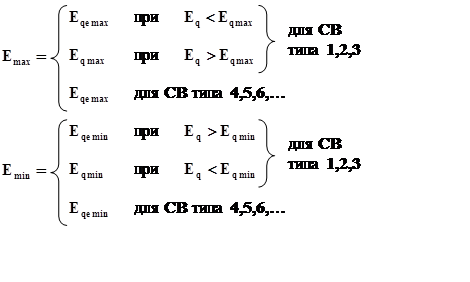
Eqemin, Eqemaxзначения э.д.с. Eqe, соответствующие ограничениям напряжения возбуждения,
Eqmin, Eqmax значения э.д.с. Eq, соответствующие ограничениям тока возбуждения (ОМВ и потолок возбуждения),
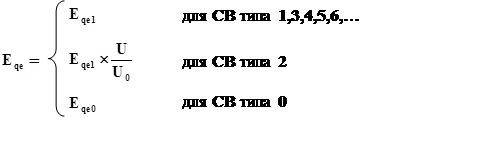
Eqe1 э.д.с. равная Eqe, для всех СВ, кроме типа 2; в случае типа 2 э.д.с. Eqe1 соответствует напряжению возбуждения, которое было бы при U=U0:
Предусмотрена возможность управления величиной Eqemax и Eqemin аналогично управлению величинами Uдоп.1 и U доп.2. Например, при потере возбуждения Eqemax = Eqemin = 0. При действии ограничителя перегрузки ротора (ОП): Eqemax=(0.9¸1.0)´Eqном.
Коэффициенты регулирования задаются в системе относительных единиц или в делениях шкал настройки АРВ и программно пересчитываются в именнованные единицы.
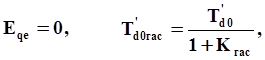
Предусмотрена возможность моделирования отключения и обратного включения автомата гашения поля (АГП) для расчетов асинхронного хода потерявшего возбуждения генератора, в расчетах пуска и самозапуска СД и пр.
 |
где:
Кгас кратность гасительного сопротивления по отношению к сопротивлению обмотки,
T'd0гас постоянная времени, используемая в соответствующих уравнениях вместо T'd0.
Дополнительные каналы регулирования для СД.
 |
где:
KP коэффициент регулирования по активной мощности,
KQ то же по реактивной мощности (так называемое "регулирование на постоянство Q"),
Kφ коэффициент "регулирования на постоянство cosφ",
KIa,KIp коэффициенты регулирования по активной и реактивной составляющим тока,
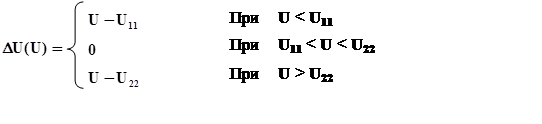 |
U11,U22 уставки регулирования по напряжению.
В обычных системах возбуждения СД включен один какой-либо канал регулирования.
Для систем возбуждения СД:
2.1.3. Регулирование мощности турбины.
Модель регулятора скорости, принятая в комплексе программ МУСТАНГ описывается максимально двумя дифференциальными уравнениями:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.