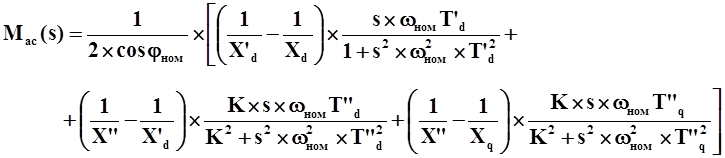
Значения К определяются на основании информации об асинхронной характеристике СД: Мас = f(s) при U = Uном.
Если характеристика Мас(s) не задана, то К = 1.
Если задан только пусковой момент Мас(100%), то
здесь:

mП кратность пускового момента СД по отношению к его номинальному моменту,
|
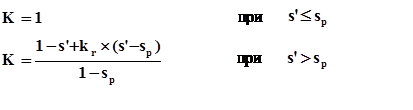
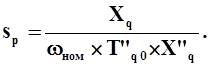
sр расчетное скольжение, которое либо задается, либо по умолчанию принимается равным,
Если характеристика Мас(s) задана для ряда значений s, то коэффициенты К(s) выбираются так, чтобы получить наилучшее возможное приближение асинхронной характеристики в математической модели СД
к заданным значениям Мас(s) c линейной интерполяцией К(s) в промежуточных точках.
На экран выдаются рассчитанные значения К и те значения Мас(s), которые соответствуют этим К.
Примечания:
1. Значения К < 1 при заданной асинхронной характеристике свидетельствуют о неудачно заданных Т"d0 и Т"q0. Если рассчитанные значения Мас(s) существенно меньше заданных, то это обычно свидетельствует о завышенном значении Х" или о неудачно заданных Т"d0 и Т"q0,
2. Задание Мас(s) с определением коэффициентов К требуется только для расчетов асинхронных режимов возбуждённых или невозбуждённых СД (после нарушения их устойчивости или при пуске СД).
2.1.2. Системы возбуждения и АРВ.
Уравнения системы возбуждения (СВ) и уравнения АРВ образуют единый блок и основаны на следующих допущениях:
1) малые постоянные времени в СВ и АРВ не учитываются или учитываются упрощенно,
2) не учитывается ряд второстепенных эффектов: нелинейность передаточных функций (эти функции заменяются на линейные с ограничениями), кратковременное снижение Eqe при близком к.з. в высокочастотной СВ (соответственно, увеличивается постоянная времени СВ) и другие,
3) упрощенно записываются уравнения высокочастотной СВ и блока сильной стабилизации (БСС),
4) упрощенно учитывается действие ограничителя минимального возбуждения (ОМВ),
5) при описании СВ и АРВ вместо тока if в обмотке возбуждения используется э.д.с. Eq.
Уравнения составлены таким образом, что они пригодны для описания всех существующих СВ и АРВ (при условии соответствующего задания параметров).Предусмотрена возможность моделирования следующих типов СВ генераторов и СК:
тип 1: независимое тиристорное возбуждение, или тиристорная система возбуждения с сериесными трансформаторами, или бесщеточная СВ с вращающимися тиристорами; АРВ сильного действия (АРВСД);
тип 2: тиристорное самовозбуждение без сериесных трансформаторов; АРВСД;
тип 3: бесщёточная СВ с вращающимися диодами; АРВСД;
тип 4: высокочастотная СВ без блока сильной стабилизации (БСС); АРВ типа корректора напряжения;
тип 5: то же, но с БСС;
тип 6: электромашинное возбуждение с возбудителем постоянного тока; компаундирование и корректор напряжения; релейная форсировка напряжения;
тип 0: отсутствие АРВ, Eqe = const.
Предусмотрена возможность управления действием АРВ от автоматики и моделирование ряда отказов АРВ и СВ (см. ниже).
 Уравнения СВ
и АРВ генераторов и СК:
Уравнения СВ
и АРВ генераторов и СК:
![]()
где:
ΔuРВ выходной сигнал первого сумматора сигналов АРВ,
K0U, K1U, K1if, K0f, K1f коэффициенты регулирования,
U0 уставка АРВ по напряжению, равная напряжению генератора в исходном режиме,
![]() α коэффициент,
позволяющий учесть изменение уставки по напряжению в корректорах напряжения от
частоты,
α коэффициент,
позволяющий учесть изменение уставки по напряжению в корректорах напряжения от
частоты,
sUt скольжение вектора напряжения используемое для формирования сигнала по отклонению частоты от предшествующего значения:
Tf постоянная времени в канале отклонения частоты,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.