 |
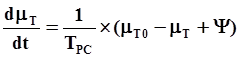 |
ТРС = ТО при открытии направляющего аппарата турбины,
ТРС = ТЗ при закрытии направляющего аппарата турбины,
μТ = РТmax при μТ > РТmax,
μТ = РТmin при μТ < РТmin,
здесь:
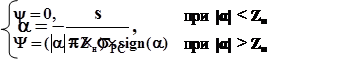
α сигнал на входе системы РС,
Ψ перемещение муфты центробежного маятника,
μТ перемещение штока сервопривода системы РС.
 |
2.1.4. Комплексная нагрузка.
Модель комплексной нагрузки в общем случае содержит три составляющие, подключенные к узлу нагрузки:
· синхронный двигатель СД (см. параг. 2.1.1.),
· асинхронный двигатель АД (см. параг. 2.1.5.),
· статическую нагрузку, представленную статическими характеристиками нагрузки по напряжению и частоте (СХН) (см. параг. 2.1.6.).
Состав и основные параметры этих элементов нагрузки определяются исходя из величины мощности в исходном режиме (РН.норм и QН.норм), для чего задаются доли активной мощности, потребляемой синхронным и асинхронным двигптелями.
 |
 |
||
Поскольку СД моделируется как генератор, то собственно, нагрузкой считается мощность, потребляемая ее асинхронной и статической составляющими:
Поэтому доля активной мощности, потребляемой асинхронным двигателем, отсчитывается от величины РН.норм:
 |
 |
Если синхронный двигатель работает с потреблением реактивной мощности (недовозбуждение), т.е. QСД.норм < 0, то необходимо задавать cosφСД.раб со знаком "-", соответственно, при перевозбуждении, т.е. QСД.норм > 0, необходимо cosφСД.раб задавать со знаком "+". Следовательно:
 |
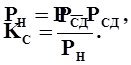
Номинальная мощность СД задается в перечне параметров синхронных машин (генераторов) со знаком "-" (как признак СД, отличающий его от генератора), при этом значения Р РСД.ном и РСД.норм связаны соотношением:
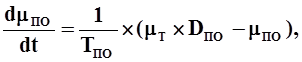
Номинальная мощность АД вычисляется по выражению:
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.