Министерство высшего и среднего специального образования
РСФСР
НГТУ
РАДИОАВТОМАТИКА
Методические указания к самостоятельной аудиторной работе (САР) для студентов III курса РТФ специальности 2301 всех форм обучения
Новосибирск
1990 г.
Данная работа включает 5 тем из курса радиоавтоматики для самостоятельного изучения студентами. По каждой теме дается краткий теоретический материал, рассматриваются примеры решения задач и предлагаются варианты задач для решения.
Составил С.Е.Лявданский, канд.техн.наук, доц.
Рецензировал Т.Б. Борукаев, д-р техн.наук, проф.
Работа подготовлена на кафедре радиоприемных и радиопередающий устройств
Тема I. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ РАДИОАВТОМАТИКИ
Цель занятия. Изучить вопросы классификации систем радиоавтоматики, принципы организации процесса управления параметрами управляемого объекта. Научиться самостоятельно составлять функциональные схемы некоторых несложных систем радиоавтоматики.
Удобнее всего данную тему начать с классификационных признаков систем радиоавтоматики, которых довольно много, и они характеризуют автоматические систем с самых различных точек зрения. Рассмотрим основные из них.
I.I. Системы стабилизации, следящие, программного регулирования. Назначением системы стабилизации является автоматическое поддержание одного или нескольких параметров объекта регулирования на заданных уровнях с определенными, обычно довольно небольшими, отклонениями. Например, система стабилизации частоты, стабилизатор постоянного или переменного напряжения, система стабилизации скорости движения магнитной ленты и др. Рассмотрим на уровне функциональной схемы одну из них – систему стабилизации частоты.
Допустим, необходимо застабилизировать частоту высокочастотного автогенератора. Один из вариантов функциональной схемы такой системы показан на рис. 1.1.
![]()
![]()
![]()
![]()
 |
|||
Рис.1.1
В качестве опорной частоты, под которую
подстраивается частота генератора, здесь взята частота ![]() высокостабильного,
например, кварцевого автогенератора. Частоты
высокостабильного,
например, кварцевого автогенератора. Частоты ![]() и
и ![]() подаются на
фазовый дискриминатор ФД,
имеющий характеристику (рис.1.2).
подаются на
фазовый дискриминатор ФД,
имеющий характеристику (рис.1.2).
Напряжение на выходе фазового дискриминатора на
линейном участке характеристики пропорционально разности фаз ![]() подаваемых на
него сигналов. Это напряжение усиливается УНТ и в качестве смещения
прикладывается к варикапу, изменяя величину его емкости, и тем самым перестраивая
частоту контура автогенератора, куда подключен варикап. Если частота
генератора
подаваемых на
него сигналов. Это напряжение усиливается УНТ и в качестве смещения
прикладывается к варикапу, изменяя величину его емкости, и тем самым перестраивая
частоту контура автогенератора, куда подключен варикап. Если частота
генератора ![]() начнет
отклоняться от частоты
начнет
отклоняться от частоты ![]() , то со временем
между двумя гармоническими сигналами увеличивается разность фаз
, то со временем
между двумя гармоническими сигналами увеличивается разность фаз ![]() , увеличивается
напряжение на выходе детектора и через УНТ прикладывается к варикапу.
Полярность включения УПТ и варикапа необходимо выбрать таким образом, чтобы в
результате произведенной подстройки рассогласование частот уменьшалось, а не
увеличивалось, т.е. обратная связь должна быть отрицательной. После завершения
отработки схемой возникшего рассогласования несколько изменится емкость
варикапа, выходное напряжение фазового дискриминатора и величина
, увеличивается
напряжение на выходе детектора и через УНТ прикладывается к варикапу.
Полярность включения УПТ и варикапа необходимо выбрать таким образом, чтобы в
результате произведенной подстройки рассогласование частот уменьшалось, а не
увеличивалось, т.е. обратная связь должна быть отрицательной. После завершения
отработки схемой возникшего рассогласования несколько изменится емкость
варикапа, выходное напряжение фазового дискриминатора и величина![]() . И это
состояние будет продолжаться до возникновения новых дестабилизирующих факторов.
Особый интерес здесь представляет то, что два колебания
. И это
состояние будет продолжаться до возникновения новых дестабилизирующих факторов.
Особый интерес здесь представляет то, что два колебания![]() и
и
![]() при постоянстве
или небольших колебаниях
при постоянстве
или небольших колебаниях ![]() имеют абсолютно
одинаковые частоты. Разность фаз есть, она постоянна, а разности частот нет.
Мы вернемся еще к этому несколько позже, при рассмотрении другого
классификационного признака.
имеют абсолютно
одинаковые частоты. Разность фаз есть, она постоянна, а разности частот нет.
Мы вернемся еще к этому несколько позже, при рассмотрении другого
классификационного признака.
Назначением следящей системы
является изменение состояния объекта регулирования по закону поступающего на
систему внешнего управляющего сигнала, т.е. какой-то параметр объекта
регулирования как бы отслеживает закон, заданный управляющим воздействием. В
качестве примера можно использовать ту же систему по рис.1.1,
если подключить к эталонному генератору
некий управляющий сигнал, изменяющий его частоту. Тогда частота![]() будет
подстраиваться под
будет
подстраиваться под ![]() , т.е. отслеживать
закон изменения частоты
, т.е. отслеживать
закон изменения частоты![]() .
.
![]()
![]()
 |
0
![]()
Рис.1.2.
Назначением системы программного регулирования является изменение состояния объекта регулирования по закону, заданному специальной программой, которая может быть заранее записана на магнитофон, перфоленту, устройство цифровой памяти, и т.п. и считываться в процессе работы. В качестве примера системы программного регулирования рассмотрим систему наведения антенны приемной станции космической телевизионной связи на спутник связи.
Высота полета спутников связи и их малые размеры практически исключают наведение антенны радиолокационными или оптическими методами. Поэтому система программного регулирования является наиболее жизнеспособной. На рис.1.3 показана упрощенная функциональная схема такой системы по одной из угловых координат (например, азимуту).
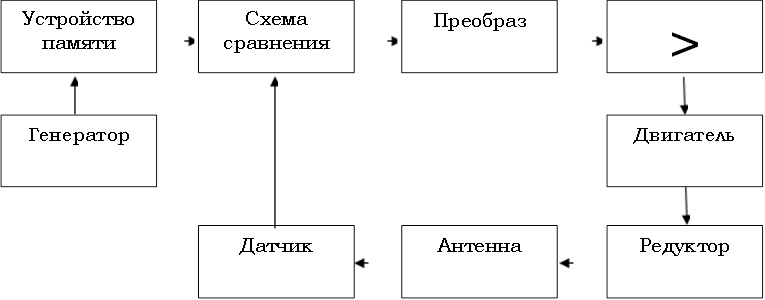
Рис.1.3.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.