Тема 2. СТРУКТУРНЫЕ СХЕМЫ И СТРУКТУРНЫЕ ПРЕОБРАЗОВАНИЯ
Цель занятия: Усвоить назначение структурных схем, основные правила преобразования структурных схем. Научиться решать задачи сведения разветвленной структурной схемы к простейшему виду и определять сигналы в различных точках системы при известном входном сигнале.
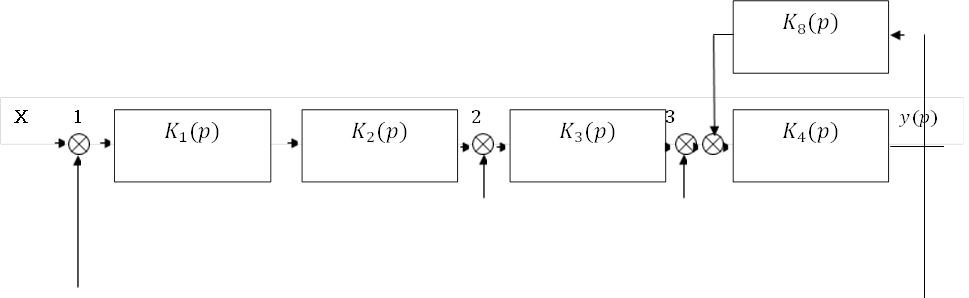
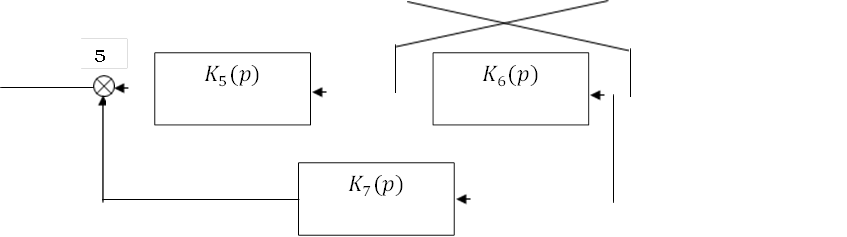
Одним из важнейших этапов исследования автоматической системы является составление ее структурной схемы, позволяющей в последующем выйти на уровень математического описания процессов, протекающих в системе. Принципиальное отлитие структурных схем от функциональных состоит в том, что если последние позволяют рассмотреть систему на уровне принципа ее работы и связей между основными элементами, то структурная схема каждому функциональному элементу (например: детектор, смеситель, усилитель, генератор и т.п.) ставит в соответствие его математическое описание, т.е. оператор. Математическое описание элемента структурной схемы в принципе может быть различным: дифференциальное уравнение; импульсная характеристика; переходная характеристика; комплексный коэффициент передачи; передаточная функция; матрица сопротивлений (проводимостей) и другие. Однако в теории автоматического управления в подавляющем большинстве случаев в качестве математического описания структурного звена используют передаточную функцию (оператор Лапласа). Нельзя сказать, что это традиция или так сложилось исторически. Дело в том, что большинство практически существующих автоматических систем имеют довольно сложные, часто разветвленные структуры, с несколькими петлями обратной связи. Вместе с тем, анализ процессов в системах, расчет их рабочих характеристик требуют упрощения сложных структур, сведения их к простейшим (например, к одной или двум эквивалентным структурным единицам, охваченным обратной связью). Такая работа связана с преобразованием сложных структурных схем, когда последовательно сворачиваются к эквивалентным структурным единицам целые группы звеньев, часто вместе с местными петлями обратных связей. В процессе преобразований структурных схем наиболее удобным и быстрым является использование именно операторного метода, когда в качестве математического описания структурного звена выступает передаточная функция. При этом выигрыш в трудоемкости по сравнению с другими способами математического описания структурных звеньев настолько большой, что операторный метод сегодня является основным в теории автоматического управления, особенно при преобразованиях структурных схем. Рассмотрим учебный пример структурной схемы и произведем ее преобразования к простейшему виду. Пусть исходная (непреобразованная) структурная схема выглядит так, как показано на рис.2.1.
4
 |
|||
Рис.2.1
На схеме рис.2.1 имеются 8 структурных звеньев, заданных своими передаточными функциями и 5 сумматоров, обозначенных, как принято в автоматике, кружочком, разделенным на 4 сектора. У любого сумматора один выход и до 3 входов, причем сигнал с входа, подключенного к не заштрихованному сектору сумматора, передается на выход без изменений, а сигнал с входа - к заштрихованному сектору, передается на выход с инверсией полярности (т.е. вычитается). Например, для сумматора I справедливо уравнение
![]()
так как сигнал Z(p)подается на инверсный вход сумматора. По существу, такой сумматор является вичитателем, то же самое относи к сумматорам 2,3,4. А сумматор 5 действительно суммирует оба сигнала, которые на него подаются, так как у него не заштрихован ни один сектор.
Присмотревшись к схеме рис.2.1, можно заметить некоторые типовые структуры:
-
последовательное включение звеньев (например, звеньев ![]() и
и
![]() );
);
- параллельное включение звеньев
(например, звеньев ![]() ,
,
![]() и
и
![]() );
);
- встречно-параллельное включение
звеньев (например, звенья![]() и
и
![]() через
сумматор 4).
через
сумматор 4).
Каждую из таких типовых структур можно заменить одним звеном с некоторой эквивалентной передаточной функцией. Например, пусть имеется цепочка последовательно включенных звеньев (рис.2.2).

Рис.2.2
Очевидно, что
![]()
![]()
…………………………
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.