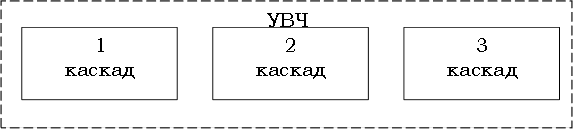
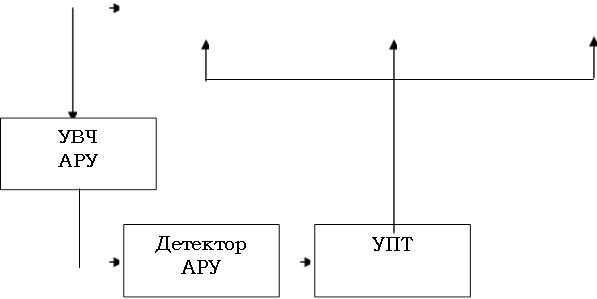
Здесь сигнал регулирования формируется из сигнала, взятого со входа приемника. Его можно предварительно усилить УВЧ АРУ, чтобы довести до требуемого уровня и отфильтровать посторонние радиостанции. Эта система также будет осуществлять регулирование в нужном направлении. Когда принимается мощная радиостанция, УПТ будет получать, а следовательно, и выдавать на каскады УВЧ большое напряжение смещения и уменьшать их коэффициент усиления, а при слабом сигнале на входе приемника - наоборот, открывать каскады УВЧ, увеличивая их коэффициент усиления.
 |
![]()
![]()
![]()
![]()
![]()
 |
|||
Рис.1.5
Вроде бы все работает так же, как показано в предыдущей схеме. Однако здесь есть одно существенное обстоятельство, которое обуславливает низкое, а иногда и вообще неудовлетворительное качество регулирования. В самом деле, ведь если в результате приема мощной станции УПТ выдаст столь сильный сигнал, что УВЧ вообще закроются и сигнал ВЧ на выходе приемника исчезает, система будет работать и продолжать регулировать усиление уже неработающего приемника. Причина - в отсутствии информации о том, что делается на выходе приемника, т.е. именно там, ради чего последний и создавался. В системе по рис. 1.4 такая информация имеется, так как детектор АРУ расположен на выходе приемника. Естественно, система по рис. 1.4 гораздо более совершенна, чем система по рис.1.5. Поскольку разница между ними, по существу, состоит в отсутствии или наличии обратной связи, системы с регулированием по отклонению называют "с обратной связью", а системы с регулированием по возмущению – "без обратной связи". Подавляющее большинство систем радиоавтоматики построены с использованием обратной связи, так как они имеют несравненно лучшие технические характеристики.
I.3. Последний классификационный признак в рамках данной темы – системы статические и астатические. Отличаются они как по свойствам, так и по построению.
Если говорить о свойствах статических и астатических систем, то основное отличие заключается в качестве регулирования. В статических системах принципиально невозможно добиться регулирования без ошибки, так как ошибка регулирования является источником формирования регулирующего воздействия. В астатических системах при выполнении некоторых условий можно добиться полного отсутствия ошибки регулирования при сохранении регулирующих воздействий. Это достигается особенностями построения астатических систем по сравнению со статическими, а именно – астатические системы обязательно содержат в своем составе интегрирующие звенья, причем их количество определяет порядок астатизма.
Дальнейшее рассмотрение этого вопроса удобно производить на конкретных примерах. На рис.1.6,а приведена функциональная схема статической системы автоматической подстройки частоты (АПЧ) в современном радиоприемном устройстве. Как известно, практически все выпускаемые в настоящее время радиоприемники строятся по супергетеродинной схеме, с преобразованием частоты, когда основное усиление производится на промежуточной частоте.
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
 |
|||||||

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()


![]()
![]()
 |
|||||||
 |
|||||||
 |
|||||||
Рис.1.6
Итак, рассмотрим схему 1.6,а.
Принимаемый приемником сигнал с частотой fс поступает на смеситель, на второй вход которого подается гармонический сигнал, несколько отличающийся по частоте. В смесителе производится нелинейное преобразование двух гармонических сигналов, в результате чего из всего многообразия гармонических и комбинационных составляющих на выходе смесителя отфильтровывают разностную частоту, называемую промежуточной.
![]()
Сигнал с выхода смесителя очень слаб,
поэтому он усиливается в усилителе промежуточной частоты УПЧ, с которого уходит
по назначению
приемника. Нас же интересует кольцо АПЧ, которое
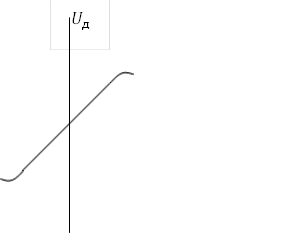
продолжается частотным дискриминатором ЧД, усилителем УПТ, варикапом с
гетеродином. Гетеродин – специальный автогенератор, предназначенный дня
выработки сигнала с частотой ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.