Исправить это можно, изменив размер и форму сечения штанг в сторону увеличения прочностных характеристик.
1.3.5 В гидросистеме гидравлического аммортизатора ножниц 1250т для подвода жидкости используются стальные трубы.
Предлагается заменить их на шланги высокого давления, что позволит упростить и сократить время ремонта.
1.3.6 На НЗС в вертикальных клетях №3 и №5 быстро изнашивается гайка в механизме подъёма кассеты (срок службы- от трёх до пяти месяцев).
Для увеличения срока службы, предлагается произвести синхронизацию привода, т.е. обеспечить равномерный подъём кассеты.
1.4 Назначение, устройство и принцип действия рольганга
Транспортные рольганги (подводящие и отводящие) обжимных станов снабжены групповым приводом. Они отличаются облегченной конструкцией, так как они транспортируют длинную полосу (блюм, сляб) и нагрузка, приходящаяся на один ролик, меньше. На всех транспортных рольгангах сделаны боковые направляющие стальные линейки, предназначенные для направления движущейся полосы.
Скорость вращения роликов рабочих рольгангов должна быть на 10¸15% выше скорости выходящего из валков металла, а у транспортных рольгангов она принимается в зависимости от типа и назначения стана и характера выполняемых технологических операций. Например, у подводящих рольгангов блюминга, транспортирующих тяжёлые слитки, скорость составляет от 1,5 до 2м/с, а у отводящих за непрерывным широкополосным станом горячей прокатки- до 30м/с.
Транспортный рольганг №2 находится на НЗС (непрерывно-заготовочном стане), между клетями 1 и В.
2. Специальная часть
2.1. Определение мощности электродвигателя рольганга
Цель расчета: рассчитать и подобрать электродвигатель привода рольганга.
Момент от сил трения в подшипниковых опорах:
 (1)
[1]
(1)
[1]
где Qм - вес транспортируемого металла, Qм =80 кН;
nр – количество роликов в рольганге, nр=4 шт.;
Gр - вес ролика, Gр=11,60кН;
dпр – диаметр внутреннего кольца подшипника, dпр=0,2 м;
Мтр.р.=(80+4*11,60)0,008*0,2/2=0,189 кНм.
Момент трения при возможной пробуксовке:
Мбук.р.=Qм*mбр*dp/2, (2) [1]
где mбр – коэффициент трения при буксировании, mбр=0,3;
dp – диаметр ролика, dp=0,45м.
Мбук.р.=80*0,3*0,45/2=5,4кН.
Полный статический момент:
Мст.р.= Мтр.р.+ Мбук.р.=0,189+5,4=5,589 кН. (3) [1]
Мощность двигателя:
Рдв= Мст.р.*wр/h , (4) [1]
где h - КПД передачи, h=0,53;
wр – частота вращения роликов, wр = 4,2 об/мин;
Рдв= 5,589*4,2/0,53=44,29 кВт.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() 2.2 Кинематический расчет и
кинематическая схема привода
2.2 Кинематический расчет и
кинематическая схема привода
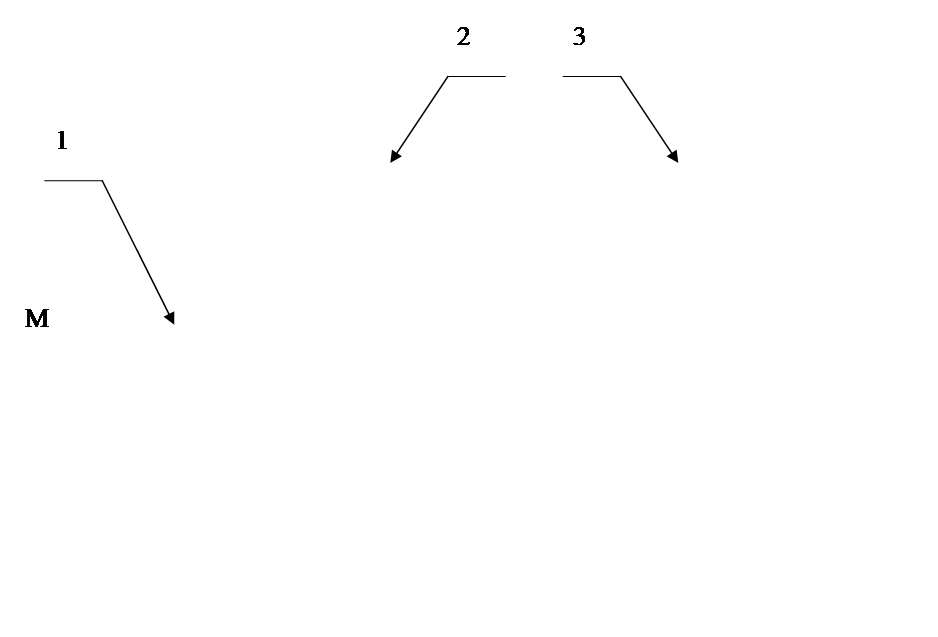 |
Где поз.1- вал 1 редуктора;
поз.2- вал 2 редуктора;
поз.3- вал 3 ролика.
Рисунок 2.1 – Кинематическая схема привода.
Исходные данные для кинематического расчёта привода:
- число роликов – 4 шт.;
- диаметр роликов – 450мм;
- ширина ролика – 700мм;
- мощность двигателя N=55 кВт;
- передаточное число редуктора U=16.
Частота вращения вала 1:
n1=nдв=550об/мин, (5) [1]
где nдв – частота вращения вала электродвигателя, nдв=550 об/мин.
Частота вращения вала 2:
n2=n1/u1 , (6) [1]
где u1 – передаточное число силового редуктора, u1=16;
n2=550/16=34,375 об/мин.
Частота вращения вала 3:
n3=n2/u2 , (7) [1]
где u2 – передаточное число распределительно редуктора, u2=1;
n3=34,375/1=34,375 об/мин.
Угловая скорость вала 1:
w1=p× n1/30 , (8) [1]
w1=3,14× 550/30=57,56 с-1.
Угловая скорость вала 2:
w2=p× n2/30 , (9) [1]
w2=3,14× 34,375/30=3,598 с-1.
Угловая скорость вала 3:
w3=p× n3/30 , (10) [1]
w3=3,14× 34,375/30=3,598 с-1.
Находим момент М1:
М1=Рдв/w1 , (11) [1]
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.