4.5. Выбрать подходящий метод моделирования для проверки оптимальности принятого решения о кратчайшем пути. Необходимо придать некоторые веса соответствующим группам рольгангов и поворотным столам, пропорциональные времени прохождения каждого из них.
5. Содержание отчета
5.1. Цель работы, постановка задачи, основные исходные данные.
5.2. Математическое описание состояния транспортной системы.
5.3. Технические средства для реализации системы управления. Блок-схема вычислительных устройств.
5.4. Алгоритмы управления и контроля транспортной системы. Считать известными (получаемыми с датчиков) моменты появления груза на рольгангах и поворотных столах. Начало движения определяется моментом появления груза на крайнем датчике рольганга.
5.5. Программа организации маршрута движения грузов, программа управления прохождением по транспортной системе с учетом возможных отказов и пересчета маршрута движения. (На рольгант и поворотный стол устанавливается одна транспортируемая единица.)
5.6. Результаты моделирования и проверки принятого решения на оптимальность маршрута.
6. Контрольные вопросы
6.1. Устройства ввода и вывода дискретной информации на ЭВМ.
6.2. Дискретные исполнительные устройства.
6.3. Методы решения экстремальных дискретных задач.
6.4. Моделирование поведения дискретных систем.
7. Исходные данные
7.1. Число рабочих мест - 7
7.2. Число ПВУ - 3
7.3. Число рольгангов - 17
7.4. Число поворотных столов - 6
7.5. Время прохождения элементов системы задается преподавателем.
Литература
1. Корданский А. А. и др. Централизованное управление машиностроительным оборудованием от ЭВМ. - М.: Машиностроение, 1979.
2. Дегтярев Ю. И. Методы оптимизации: Учеб. пособие для вузов.-М.: Сов.радио, 1980.
3. Коршунов Ю.М. Математические основы кибернетики: Учеб. Пособие для вузов. - М.: Энергоатомиздат, 1987.
Приложение 1.
Корданский А. А. и др. Централизованное управление машиностроительным оборудованием от ЭВМ.
ОРГАНИЗАЦИЯ ОБСЛУЖИВАНИЯ ОТ ЭВМ ЦИКЛИЧЕСКИХ ПРОЦЕССОВ В РЕЖИМЕ РАЗДЕЛЕНИЯ ВРЕМЕНИ
Высшим приоритетом наряду с рассмотренными выше, обладают также сигналы о выполнении автоматических циклов. Такие циклы могут встречаться при непосредственном управлении станками с ЧПУ от ЭВМ, управлении вспомогательными агрегатами, например автоматизированными складами (циклы движения погрузочно-разгрузочных устройств), агрегатными станками и автоматическими линиями и др. Сигналы, относящиеся к автоматическим циклам, должны обрабатываться по высшему приоритету в связи с тем, что на них необходимо быстро реагировать. Так, в агрегатных станках выдача сигнала из системы управления, например на реверсирование рабочего движения, должна происходить не позднее чем через 0,01 с после поступления от датчиков цикла (конечных выключателей, реле давления и др.) набора сигналов, соответствующих этому переключению. В противном случае, при современных рабочих скоростях возникнут недопустимые
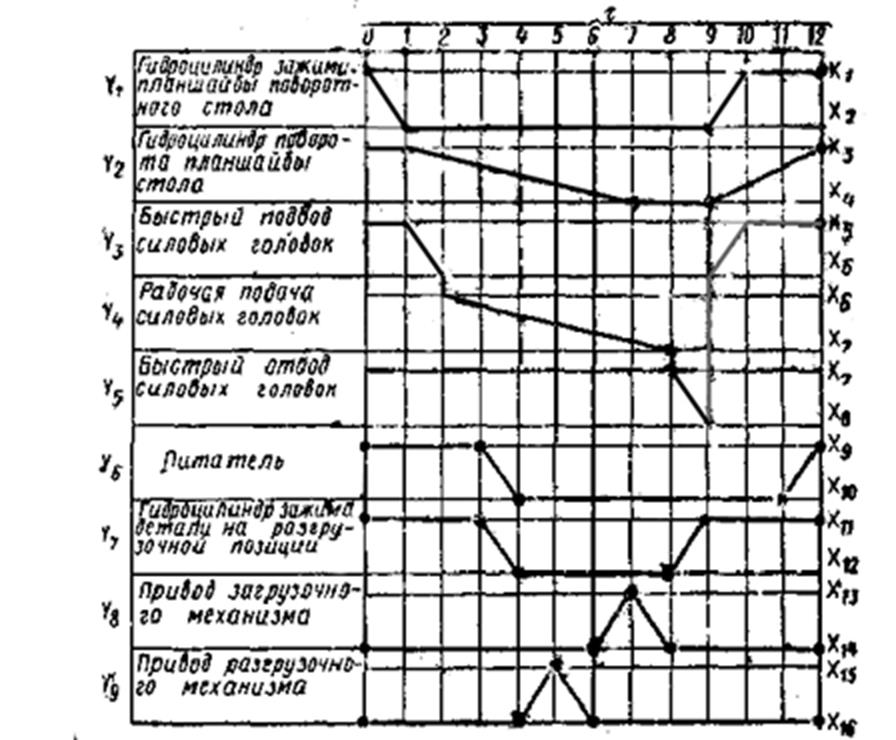
Рис.35. Циклограмма движений механизмов агрегатного станка
перебеги и, как следствие, потери точности и аварийные ситуации.
Сигналы от дискретных датчиков подключаются либо к инициативным входам, либо к входам ввода дискретной информации ЭВМ. В первом случае обращение ЭВМ к проверке комбинаций сигналов от датчиков осуществляется в режиме прерывания по факту изменения этих сигналов. Во втором случае обращение может осуществляться по указаниям организующей программы в соответствии с назначенной системой приоритетов. Общая схема действий при таком обращении выглядит следующим образом: чтение поступивших сигналов; выработка решения; выдача исполнительных команд.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.