Цель работы: ознакомиться с принципами и методам программно-логического управления транспортными системами, предназначенными работать в условиях гибкого автоматического производства (ГАП). Выбрать метод построения алгоритма управления, предусмотреть контроль за состоянием транспортной системы.
1. Описание объекта и режим работы схемы управления
В технологическом производственном процессе весьма важное место занимает транспортировка сыpья, полуфабрикатов, готовой продукции, инструмента и вспомогательных средств, обеспечивающих работу оборудования, между технологическими агрегатами и складами. От правильно выбранной системы и алгоритма управления зависит производительность всей технологической цепочки. Особенно это справедливо для дискретного производства, где уменьшение транспортных потерь является одним из основных способов повышения производительности участка, цеха и т.д. в целом. Примером варианта реализации транспортной сети может быть система рольгангов и поворотных столов, обеспечивающая транспортировку грузов от рабочих мест на склад готовой продукции и обратно, в частности в условиях автоматизированного производства и ГАП.
Рольганг представляет собой систему вращающихся роликов. Все или некоторые из них имеют привод от двигателя, продвигающего груз вдоль рольганга в ту или другую стороны. Моменты прохождения грузом крайних точек рольганга фиксируется датчиками контактно-нажимного действия или с использованием оптоэлектронной пары.
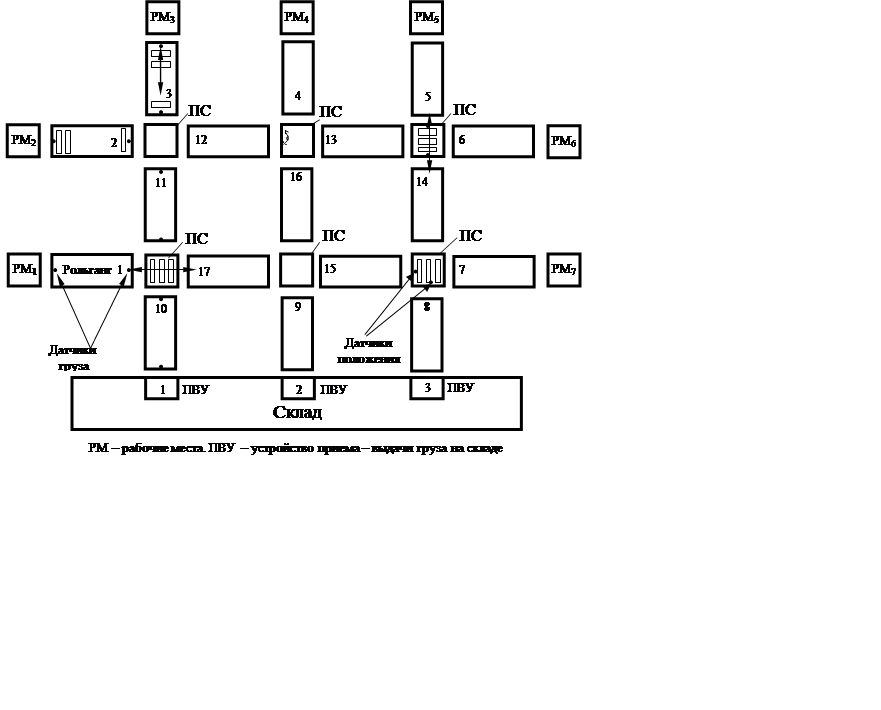
Поворотный стол - это тот же рольганг, но с возможностью поворота на 90° в ту или другую сторону вокруг вертикальной оси. Поворотные столы позволяют изменять направление движения- груза. Движение роликов начинается по команде от системы управления при появлении на них груза. Сигналы о нахождении груза и положении поворотного стола поступают от датчиков аналогично рольгангам. Движение поворотного стола осуществляется с помощью двух двигателей с редуктором. На рисунке показана рольганговая транспортная система с поворотными столами, рабочими местами и складом.
 |
2. Реализация системы управления
Управление транспортной системой реализуется с помощью ЭВМ. Сигналы дискретных датчиков и управляющие сигналы взаимодействуют с процессором через устройства связи с объектом и контроллеры. Диагностические сообщения выводятся на дисплей. В реальной система ГАП эти сообщения поступают на верхний уровень управления. Общая схема системы управления с ЭВМ показана на рис. 2.1 в лабораторной работе 2.
3. Содержание работы
3.1. Изучение работы рольганговой транспортной системы, представленной на рисунке.
3.2. Разработка технической структуры системы управления.
3.3. Разработка приемлемого алгоритма программно-логического управления.
4. Порядок выполнения работы
4.1. Изучите функции рольганговой транспортной системы (см. рисунок), датчиков и исполнительных устройств, логику работы системы управления.
4.2. Составить уравнения, связывающие управляющие воздействия на рольганги и поворотные столы и сигналы датчиков состояния.
4.3. Предложить алгоритм логического управления транспортной системой при движении грузов от рабочих мест на склад с учетом выхода из строя любого рольганга, поворотного стола и приемовыдающего устройства (ПВУ) склада. Модель отказов - экспоненциальное распределение с заданными параметрами. Алгоритм должен отражать две стадии работы системы управления транспортом: режим поиска кротчайшего маршрута и слеяжение за продвижением груза.
4.4. Написать программу логического управления транспортной системой. В программе учесть возможность возникновения аварийных ситуаций при выходе из строя элементов транспортной системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.