Цель работы: исследование функционирования дискретного технологического оборудования, положение рабочих органов которого контролируется множеством дискретных датчиков, построение технической структуры системы управления, разработка алгоритмов, программы управления и контроля за состоянием и выполнением функций.
1. Описание объекта управления
В качестве дискретного объекта управления будем исследовать работу малогабаритного агрегатного шестипозиционого станка, выполняющего механическую обработку корпусных деталей. Рабочие органы
насчитывают некоторое количество механизмов, имеющих различные
режимы движения (медленное, быстрое, вперед, назад и т.п.). Обработка деталей состоит в циклическом повторении операций, необходимых по условиям, заданным технологическим процессом. Весь цикл управления станком состоит из заданного числа тактов упpавления, определяемого циклограммой. Циклограмма подготавливается технологом в зависимости от вида обрабатываемой детали и технологии ее изготовления. Информация о состоянии и положении рабочих органов и деталей снимается с помощью дискретных датчиков положения и концевых выключателей. Рассматриваемое технологическое оборудование является упрощенной формой станка c числовым программным управлением. Подобные станки используются в качестве технологической основы модулей гибкого автоматического производства.
2. Реализация системы управления объектом
Управление станком происходит по заданной программе, разработка которой осуществляется на основе циклограммы, определяющей моменты включения-выключения исполнительных устройств, изменение направления движения и ее скорость. В соответствии c циклограммой тот или иной рабочий орган - исполнительное устройство - может иметь два и более состояний. Сигналы с множества датчиков поступают в ЭВМ, опрашиваются в некоторые моменты времени, определяемые программно, по таймеру или от специального синхронизирующего датчика. Результаты опроса контролируются по разработанной программе, анализируются на соответствие уравнениям, сформированным на основе циклограммы, вырабатываются управляющие воздействия или выводятся диагностические сообщения.
Технические средства системы упpавления дискретным технологи-
ческим оборудованием должны включать в себя дискретные датчики контактного или оптоэлектронного типа, расположенные на объекте управления, устройства ввода-вывода дискретной информации, контроллеры внешних утройств, микроЭВМ, устройство отображения. Конкретный тип ЭВМ зависит от технико-экономических факторов и общей идеологии, принятой во всей иерархической системе управления. Общая схема системы управления и объекта показана на рис.2.1.
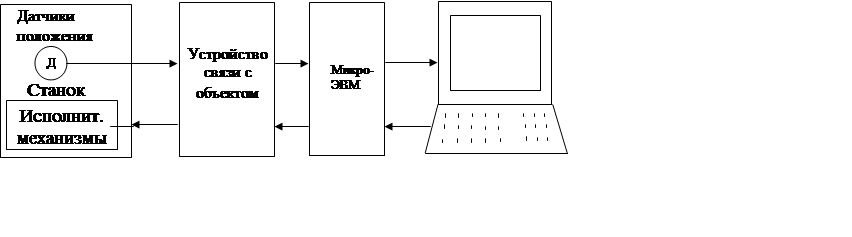
Рис.2.1.Общая схема системы управления станков от ЭВМ
3. Содержание работы
3.1. Изучение работы циклического технологического объекта.
3.2. Разработка технической структуры системы управления.
3.3. Подготовка необходимого математического обеспечения, определяющего алгоритм управления.
3.4. Разработка алгоритмов и программ управления.
4. Порядок выполнения работы
4.1. Ознакомиться с принципом управления циклическими дискретными процессами, изучить работу технологического объекта, используя литературу [1].
4.2. По циклограмме, заданной преподавателем (рис.2.2, 2.3,2.4) начертить диаграмму изменения состояния входов и выходов, записать уравнения, опpеделяющие логические условия перехода от одного интервала (такта управления) к следующему и уравнения для управляющих сигналов.
4.3. Составить техническую структуру системы управления, включающую элементы вычислительной системы, устройств связи с объектом и т.д.
4.4. Разработать алгоритм работы системы управления цикли-
ческим процессом, проходящим на объекте. Синхронизацию движения
обеспечить методом, заданным преподавателем. Предусмотреть возможные сбойные ситуации, их обнаружение и сигнализацию (отображение на дисплей).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.