При розв'язанні різних задач прикладного характеру доводиться знаходити відразу кілька невідомих функцій, що залежать від одного аргументу, що входять у кілька рівнянь, тобто приходиться мати справу із системою рівнянь.
Системою диференціальних рівнянь називається
система, що зв'язує незалежну змінну ![]() , невідомі функції цієї
змінної
, невідомі функції цієї
змінної ![]() й похідні цих функцій по незалежній змінній.
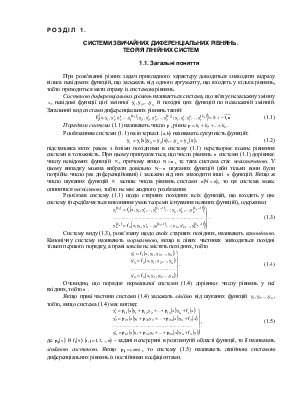
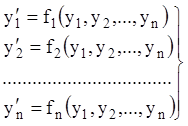
Загальний вид системи диференціальних рівнянь такий:
й похідні цих функцій по незалежній змінній.
Загальний вид системи диференціальних рівнянь такий:
![]()
![]() (1.1)
(1.1)
Порядком системи (1.1) називають число ![]() , рівне
, рівне ![]() .
.
Розв'язанням системи (1.1) на інтервалі ![]() називають
сукупність функцій:
називають
сукупність функцій:
![]() ,
(1.2)
,
(1.2)
підстановка яких разом з
їхніми похідними в систему (1.1) перетворює кожне рівняння системи в
тотожність. При цьому припускається, що число рівнянь ![]() системи
(1.1) дорівнює числу невідомих функцій
системи
(1.1) дорівнює числу невідомих функцій ![]() ,
причому якщо
,
причому якщо ![]() , те така система стає невизначеною.У цьому випадку можна вибрати довільно
, те така система стає невизначеною.У цьому випадку можна вибрати довільно ![]() шуканих
функцій (аби тільки вони були потрібне число раз диференційовані) і залежно від
них знаходити інші
шуканих
функцій (аби тільки вони були потрібне число раз диференційовані) і залежно від
них знаходити інші ![]() функцій. Якщо ж число шуканих
функцій
функцій. Якщо ж число шуканих
функцій ![]() менше числа рівнянь системи
менше числа рівнянь системи ![]() , то ця система може опинитися неспільною,
тобто не має жодного розв'язання.
, то ця система може опинитися неспільною,
тобто не має жодного розв'язання.
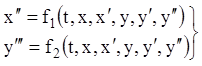
Розв’язав систему (1.1) щодо старших похідних всіх функцій, що входять у цю систему (передбачається виконання умов теореми існування неявних функцій), одержимо:
 . (1.3)
. (1.3)
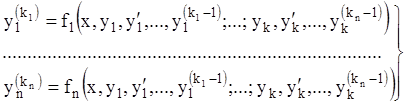
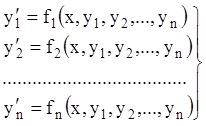
Систему виду (1.3), розв’язану щодо своїх старших похідних, називаютьканонічною. Канонічну систему називають нормальною, якщо в лівих частинах знаходяться похідні тільки першого порядку, а праві зовсім не містять похідних, тобто
 .
(1.4)
.
(1.4)
Очевидно, що порядок нормальної системи (1.4) дорівнює числу рівнянь у
неї вхідних, тобто![]() .
.
Якщо праві частини системи (1.4) залежать лінійно від шуканих
функцій ![]() , тобто, якщо система (1.4) має вигляд:
, тобто, якщо система (1.4) має вигляд:
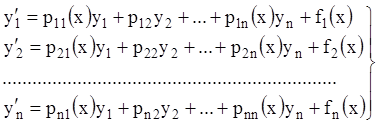 ,
(1.5)
,
(1.5)
де ![]() й
й ![]()
![]() – задані неперервні в розглянутій області
функції, то її називають лінійною системою. Якщо
– задані неперервні в розглянутій області
функції, то її називають лінійною системою. Якщо ![]() ,
то систему (1.5) називають лінійною системою диференціальних рівнянь із
постійними коефіцієнтами.
,
то систему (1.5) називають лінійною системою диференціальних рівнянь із
постійними коефіцієнтами.
Якщо праві частини системи (1.4) не залежать явно від незалежної
змінної ![]() , тобто система має вигляд:
, тобто система має вигляд:
 ,
(1.6)
,
(1.6)
то її називають автономною або стаціонарною.
Дві системи диференціальних рівнянь називаються еквівалентними, якщо вони мають ті самі розв'язки. Виявляється, що будь-яку канонічну систему (1.3) завжди можна перетворити в еквівалентну нормальну систему, причому порядок цих систем буде тим самим. Для цього досить кожну похідну невідомих функцій, за винятком найбільших, замінити новою невідомою функцією. Наприклад, канонічна система:
після введення
нових невідомих функцій ![]() приводиться до
нормальної системи:
приводиться до
нормальної системи:
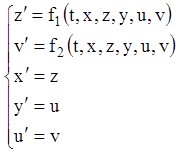 .
.
У зв'язку з тим, що будь-яку канонічну систему завжди можна перетворити в еквівалентну нормальну систему, далі будемо розглядати тільки нормальні системи.
Розглянемо задачу, що приводить до системи диференціальних рівнянь:
визначити траєкторію руху снаряда, викинутого з початковою швидкістю ![]() під кутом
під кутом ![]() до обрію,
вважаючи опір повітря пропорційним швидкості руху.
до обрію,
вважаючи опір повітря пропорційним швидкості руху.
Розв'язання. За початок координат візьмемо точку вильоту снаряда. Рівняння руху будуть:
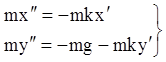 .
(1.7)
.
(1.7)
(На
снаряд діє його сила ваги ![]() , її складова на осі
, її складова на осі ![]() дорівнює нулю, тому що сила ваги перпендикулярна
до осі
дорівнює нулю, тому що сила ваги перпендикулярна
до осі ![]() ). Якщо ж зневажити опором повітря, то
система (1.7) запишеться:
). Якщо ж зневажити опором повітря, то
система (1.7) запишеться:
 . (1.8)
. (1.8)
Тобто задача, навіть при дуже спрощених умовах, зводиться до розв'язання системи двох рівнянь (1.8). Вирішимо її, інтегруючи рівняння:
 .
.
У початковий момент часу ![]() компоненти швидкості
будуть:
компоненти швидкості
будуть: ![]() ,
, ![]() . Тоді
. Тоді ![]() й
й ![]() і
система запишеться
і
система запишеться
 .
.
Тому що при ![]()
![]() , то
, то ![]() .
.
Остаточний рух:
 .
.
Крім параметра ![]() , знайдемо траєкторію руху:
, знайдемо траєкторію руху:
 —
парабола.
—
парабола.
Дистанція польоту снаряда знаходиться з рівняння ![]() :
:

(![]() – вихідна точка).
– вихідна точка).
Легко бачити, що максимальна дистанція буде при стрілянині під кутом  (у дійсності цей кут приблизно дорівнює
(у дійсності цей кут приблизно дорівнює ![]() ).
).
Відомо, що рівняння першого порядку ![]() задає
на площині
задає
на площині ![]() деяке поле напрямків, і що напрямок
дотичній у будь-якій точці інтегральної кривої збігається з напрямком поля в
цій точці. Аналогічне геометричне тлумачення можна дати й нормальній системі
(1.4). Будемо розглядати
деяке поле напрямків, і що напрямок
дотичній у будь-якій точці інтегральної кривої збігається з напрямком поля в
цій точці. Аналогічне геометричне тлумачення можна дати й нормальній системі
(1.4). Будемо розглядати ![]() як координати точки в
як координати точки в ![]() - мірному просторі
- мірному просторі ![]() .
Тоді розв'язанню (1.2) відповідає деяка крива в
.
Тоді розв'язанню (1.2) відповідає деяка крива в ![]() -
мірному просторі. Вона називається інтегральної кривої системи (1.4).
З'ясуємо геометричний зміст інтегральних кривих.
-
мірному просторі. Вона називається інтегральної кривої системи (1.4).
З'ясуємо геометричний зміст інтегральних кривих.
Нехай праві частини системи (1.4) визначені та кінцеві в деякій області
![]() зміни змінних
зміни змінних ![]() .
Проведемо в кожній точці області
.
Проведемо в кожній точці області ![]() відрізок, напрямні
косинуси якого пропорційні одиниці й значенням правих частин системи (4) у цій
точці й назвемо множину цих відрізків полем напрямків.
відрізок, напрямні
косинуси якого пропорційні одиниці й значенням правих частин системи (4) у цій
точці й назвемо множину цих відрізків полем напрямків.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.