Усяка інтегральна крива системи (1.4) володіє тою чудовою властивістю, що в кожній її точці напрямок дотичною збігається з напрямком поля, визначеного системою (1.4) у цій точці.
Справді, записавши нормальну систему (1.4) у вигляді:
 (1.9)
(1.9)
і підставивши замість ![]() розв'язання (1.2) системи (1.4), ми будемо
мати рівняння дотичної до інтегральної кривої (1.2), причому відрізки поля
напрямків є відрізками цієї дотичної в кожній точці поля.
розв'язання (1.2) системи (1.4), ми будемо
мати рівняння дотичної до інтегральної кривої (1.2), причому відрізки поля
напрямків є відрізками цієї дотичної в кожній точці поля.
Якщо в точці ![]() всі праві частини системи (1.4)
або деякі з них звертаються в невизначеність
всі праві частини системи (1.4)
або деякі з них звертаються в невизначеність ![]() , то
говорять, що в цій точці поле не визначене. Будемо вважати, що через таку точку
не проходить жодна інтегральна крива системи (1.4). Якщо інтегральна крива
(1.2) володіє тою властивістю, що
, то
говорять, що в цій точці поле не визначене. Будемо вважати, що через таку точку
не проходить жодна інтегральна крива системи (1.4). Якщо інтегральна крива
(1.2) володіє тою властивістю, що ![]() ,
, ![]() , ...,
, ..., ![]() при
при ![]() , то говорять, що ця інтегральна крива
примикає до точки
, то говорять, що ця інтегральна крива
примикає до точки ![]() .
.
Можна дати й механічне тлумачення нормальної системи (1.4) і її
розв'язку (1.2). Будемо розглядати незалежну змінну ![]() як час,
а систему значень невідомих функцій
як час,
а систему значень невідомих функцій ![]() ,
, ![]() , ...,
, ..., ![]() як
координати точки
як
координати точки ![]() - мірного простору, яке
називається фазовим простором
- мірного простору, яке
називається фазовим простором ![]() . Тоді система (1.4) має
вигляд:
. Тоді система (1.4) має
вигляд:
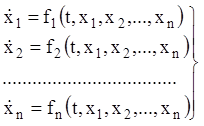 .
(1.10)
.
(1.10)
Ця система визначає в кожен момент часу ![]() в даній
точці фазового простору
в даній
точці фазового простору ![]() компоненти швидкості
компоненти швидкості ![]() точки, що рухається.
точки, що рухається.
Задача знаходження розв'язання системи (1.10) складається у визначенні
величин ![]() ,
, ![]() , ...,
, ..., ![]() , якщо дано, що при
, якщо дано, що при ![]() координати
мали початкові значення
координати
мали початкові значення ![]() . Або іншими словами
знайти функції
. Або іншими словами
знайти функції
![]() , ...,
, ..., ![]() .
(1.11)
.
(1.11)
Звичайно при такому тлумаченні система (1.10) називається динамічною, а кожне її розв'язання (1.11) –рухом. Крива, описувана точкою при русі, називається траєкторією руху. Рівняння (1.11) – параметричні рівняння траєкторії руху. Вони визначають траєкторію як геометричне місце точок, але, визначаючи положення точки на траєкторії в будь-який момент часу, показують, як відбувається рух точки по траєкторії із часом.
Найбільший інтерес становить випадок автономної системи (1.6). Рівняння
цієї системи визначають стаціонарний рух середовища, швидкість у кожній точці
простору не залежить від часу й, отже, є постійною в цій точці протягом усього
часу. Розв'язання (1.11) залежить від ![]() довільних
постійних
довільних
постійних ![]() – координат початкового положення точки,
траєкторія якої розглядається.
– координат початкового положення точки,
траєкторія якої розглядається.
Якщо всі функції ![]()
![]() в
рівняннях руху (1.11) являють собою константи
в
рівняннях руху (1.11) являють собою константи ![]() ,
, ![]() , ...,
, ..., ![]() , той
рух (1.11) вироджується в стан спокою
, той
рух (1.11) вироджується в стан спокою
![]() ,
, ![]() , ...,
, ..., ![]() ,
,
а його траєкторія –
у точку ![]() .
.
Висновок: основною задачею інтегрування системи (1.10) є знаходження всіх рухів, обумовлених цією системою, і вивчення їхніх властивостей.
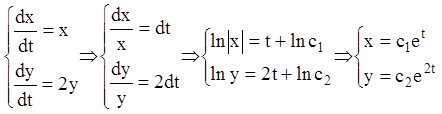
Приклад. Розв’язати
систему  .
.
Розв'язання.
 .
.
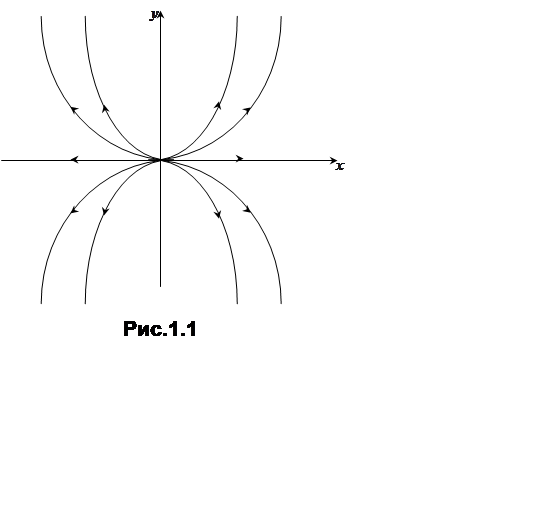
Таким чином, ця система визначає сімейство рухів виду ![]() ,
, ![]() , де
, де ![]() й
й ![]() –
довільні постійні. Для одержання траєкторії виключаємо із сімейства рухів
параметр
–
довільні постійні. Для одержання траєкторії виключаємо із сімейства рухів
параметр ![]() :
:  або
або ![]() , де
, де 
![]() . Тобто траєкторіями цих рухів служать
напівпараболи
. Тобто траєкторіями цих рухів служать
напівпараболи ![]()
![]() , півосі
координат і початок координат (на малюнку стрілки вказують напрямок рухів при
зростанні
, півосі
координат і початок координат (на малюнку стрілки вказують напрямок рухів при
зростанні ![]() ).
).
Для нормальної системи (1.4)задача Кошіставиться так: серед всіх розв'язків (1.4) знайти таке:
![]() ,
, ![]() , ...,
, ..., ![]() ,
(1.12)
,
(1.12)
у якому функції ![]()
![]() при заданому значенні
незалежної змінної
при заданому значенні
незалежної змінної ![]() приймають задані значення,
тобто:
приймають задані значення,
тобто:
![]() ,
, ![]() , ...,
, ..., ![]() . (1.13)
. (1.13)
При цьому ![]() називають, відповідно, початковими
значеннями незалежної змінної й шуканої функцій, а умови (1.13) – початковими
умовами задачі Коші.
називають, відповідно, початковими
значеннями незалежної змінної й шуканої функцій, а умови (1.13) – початковими
умовами задачі Коші.
Геометричне тлумачення задачі Коші: серед всіх
інтегральних кривих системи (1.4) знайти ту, котра проходить через задану точку
![]() .
.
Механічне тлумачення задачі Коші для нормальної системи (1.10) з початковими умовами
![]() ,
, ![]() , ...,
, ...,
![]() : (1.14)
: (1.14)
із всіх рухів, обумовлених системою (1.10), знайти такий рух
![]() ,
, ![]() , ...,
, ..., ![]() ,
(1.15)
,
(1.15)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.