

















I. Проектирование и расчет прибора.
Данные для проектирования:
ωζmax = ± 55
град/с;
ωζmin =
0,1 град/с;
tc min = - 60°С; tc max =
60°С;
Vηmax = V ζmax = Vξmax = 5g;
ωηmin =ωζmax = 45 град/с;
Gдус = 15H
срок службы 5000 ч.;
термостатирование не допустимо.
Расчет:
Выбор конструктивной схемы:
 , где Q – добротность.
, где Q – добротность.
При Q> 0.5·103 выбирают ДУС с магнитной пружиной. Учитывая значительные
величины перегрузок  большой диапазон изменения температуры окружающей
среды при недопустимом термостатировании и малость ωζmin, остановимся на ДУС поплавкового типа с полным взвешиванием подвижного
узла. Исходя из данного температурного диапазона и недопустимости термостатирования,
выбираем жидкость с удельным весом γ ж = 1·104
H /м3 , и γ дус =
4·104 H /м3 т.к. особенностью более
тяжелых жидкостей является то, что они затвердевают при отрицательных
температурах. Поскольку требуется обеспечить полное взвешивание подвижного узла
при малом удельном весе демпфирующей жидкости, то магнитнузю систему следует
расположить на корпусе ДУС.
большой диапазон изменения температуры окружающей
среды при недопустимом термостатировании и малость ωζmin, остановимся на ДУС поплавкового типа с полным взвешиванием подвижного
узла. Исходя из данного температурного диапазона и недопустимости термостатирования,
выбираем жидкость с удельным весом γ ж = 1·104
H /м3 , и γ дус =
4·104 H /м3 т.к. особенностью более
тяжелых жидкостей является то, что они затвердевают при отрицательных
температурах. Поскольку требуется обеспечить полное взвешивание подвижного узла
при малом удельном весе демпфирующей жидкости, то магнитнузю систему следует
расположить на корпусе ДУС.
Определение габаритов и величины кинетического момента:
Исходя из данного веса прибора GДУС, определим его объем VДУС и площадь
поверхности SДУС.
 ;
;
 ;
;
Рационально спроектированный ДУС с магнитной пружиной имеет вид
цилиндра, длина которого LДУС примерно в 2.5 раза превышает его диаметр,
следовательно:
LДУС = 2.5·DДУС = 2.5·0.063 = 0.158 м;
Sдус = 3·π·D2 ДУС = 3·3.14·(0.063)2 = 0.038 м2
По площади SДУС, максимальной температуре окружающей среды tcmax = 60°С,
максимально допустимой температуре прибора tpmax, определим допустимую
мощность, которая может выделяться элементами ДУС:
1
РДУСдоп = α · κ · SДУС ·(tp max - tc max), для нетермостатируемых приборов
tp max= 80 ÷ 90°С
PДУСдоп =7 · 1.2 · 0.038 · (80 - 60) = 6.361Вт, где α
=7 ÷ 9 
![]()
(для воздуха при нормальном давлении, конвенция свободная); κ1 = 1.2 ÷ 1.5 – коэффициент, учитывающий теплопередачу через элементы крепления ДУС к объекту.
Расчетное значение РДУС =(0.8÷0.9) ∙ РДУС,
РДУС = 0.8 ∙ 6.361 = 5.0895т, где РДУС – мощность ДУС.
Расчет гиромотора:
Выбираем гиромотор симметричной конструкции со стальным ротором и
частотой вращения 24 об/мин. Среда - гелий, давление 300 мм.рт.ст., тогда
|
Dcф,мм |
 диаметр гиромотора DГМ:
диаметр гиромотора DГМ:
DГМ= (0.7÷0.75) ∙ DДУС
DГМ = 0.7 ∙ 0.063 = 0.044 м
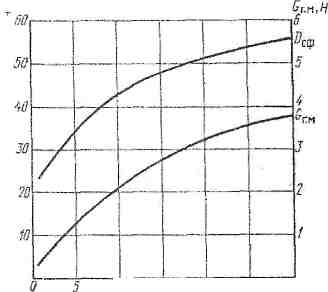
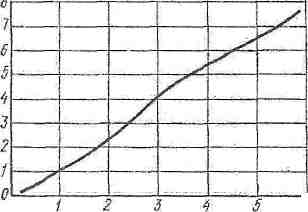
Зная его диаметр по графику № 1 определим кинетический момент Н и вес GГМ
Н =10Н∙см∙с
|
Н,Нсм∙с |
|
10 15 20 25 30 |
|
Рис. 1 Зависимость диаметра и веса пи- ройоторов от величины кинетического ио мента (стальной ротор, частота вращения 24 000 об/мин) |
Для распределения полученной мощности ДУС между гиромотором и датчиком момента необходимо составить расчетную таблицу:
Так как при Н = 10Н∙см∙с условия: GДМ +GГМ ≤ 0,5GДУС и VПУ ≤0,45VДУC не соблюдаются уменьшаем кинетический момент до тех пор, пока не удовлетворятся этим неравенствам.
|
Н |
РГМ |
GГМ |
0,8Нωζ,max |
PДМ = 0,9РДУС - РГМ |
|
GДМ + GГМ |
GДМ |
VПУ |
|
10 |
3 |
2,1 |
7,675 |
1,5801 |
6,1 |
не удовл. условию |
8 |
не удовл. условию |
|
7,5 |
2,7 |
1,7 |
5,756 |
1,8801 |
4,19788 |
7,3 |
5,6 |
не удовл. условию |
|
7 |
2,7 |
1,6 |
5,373 |
1,9301 |
3,867 |
6,9 |
5,3 |
не удовл. условию |
|
6 |
2,6 |
1,4 |
4,605 |
1,9801 |
3,2725 |
5,9 |
4,5 |
не удовл. условию |
|
5 |
2,5 |
1,2 |
3,837 |
2,0801 |
2,661 |
4,6 |
3,4 |
2,156 ∙10-4 |
Для ДУС с Н = 5Н∙см∙с имеем:
GГМ=l.2H
LГМ = 0,5 ∙ DГМ
LГМ = 0,5 ∙ 0,044 = 0.022 м
2
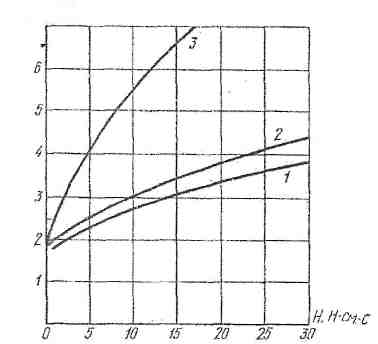
По графику № 2 по значению кинетического момента определим мощность
гиромотора РГМ
 PГМ, H∙мc∙с
PГМ, H∙мc∙с
РГМ=2.5Вт
Рис. 2. Зависимость- выделяемой мощности
гиромотора от величины кинетического
момента и среды (стальной ротор, частота
вращения 24 000 об/мин);
1 - вакуум; 2 - водород, гелий 300 мм рт, ст;
3 - воздух
По известным Ммах и РДМ определяем вес датчика момента и с помощью
графика 3.
G,H
![]()
Рис.3. Зависимость веса двухполюсных моментных датчиков с магнитопроводом из сплава ЮНДК-24 от отношения
M/![]()
М = 0.8 ∙ Мmax
Мтах=H ∙ ωζтах
Расчет датчика моментов:
PДМ = 0.9 ∙ РДУС - PДМ
PДМ = 0.9 ∙ 5.089 – 2.5 = 2.08 Вт
DДМ = (0.8 ÷ 0.9) ∙ DДУС
DДМ =0.8 ∙ 0.063 = 0.054м
По графику 3. GДМ =3.4Н
Для рационально спроектированных приборов суммарный вес гиромотора и датчика момента для ДУС с жидкостным заполнением составляет: 45-50% веса поплавкового ДУС.
Gдм + Gгм ≤ 0.45 ∙ Gдус
Средний удельный вес датчика
момента γдм = (6 ÷ 6.5) ∙ 104 ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
