Прибор подключен к внешней цепи с помощью 24-штырькового штепсельного разъема Ш1 .Напряжение питания гиромотора подается на штырьки 1,2 и 3. На штырек 1 подается III фаза (фаза С), на штырек 2-II фаза (фаза В), на штырек 3-I фаза (фаза А), т.е. напряжение поочередно достигает максимума на штырьках 3, 2, 1, 3, 2, 1 и т.д. Питание реле времени, порогового устройства и исполнительного реле осуществляется напряжением постоянного тока 27 В. Минус питающего напряжения подается на штырек 4, плюс - на штырек 5. К штырькам 6-7, 8-9, 10-11, 12-13, 14-15, 16-17 подключаются внешние электрические цепи: к 6-7 - цепь, которая при разворотах объекта должна замыкаться; к 8-9, 10-11, 12-13, 14-15, 16-17- цепи, которые при разворотах должны размыкаться. В приборе к этим штырькам подключены контакты исполнительного реле, в качестве которого используется стандартное электромагнитное поле. К штырьку 24 времени и исполнительного реле при проверках прибора можно осуществлять через 19-штырьковый штепсельный разъем Ш-2.
Переменное напряжение, питающее гиромотор, подается на штырьки 1, 2 и 3 с таким же чередованием фаз, как и на штепсельный разъем Ш 1. Напряжение постоянного тока 27 В подается на штырьки 11 и 12. На штырек 11 подается минус питающего напряжения, на штырек 12-плюс. При включении
гиромотора для проверки времени вхождения в синхронизм питание гиромотора осуществляется через импульсный трансформатор БИТ. Вторичная обмотка импульсного трансформатора имеет выход на штырьки 4 и 5 штепсельного разъема Ш2. К штырькам 6, 7 и 8 штепсельного разъема Ш2 подключены
8
моментные датчики МД2 и МД1 гиродатчика прибора. Для проверки реле времени и исполнительного реле их контакты имеют выход на штепсельный разъем Ш2: точка 4 платы реле времени - на штырек 10; точка 9 -на штырек 9; контакт 19 исполнительного реле - на штырек 13. Переменные сопротивления R30 и R31 служат для регулировки крутизны моментного датчика. Изменяя сопротивления, добиваются срабатывания прибора при подаче определенной величины тока на катушки моментного датчика МД1 или МД2. Переменными сопротивлениями R28 и R32 регулируют крутизну магнитной пружины, добиваясь определенной чувствительности прибора и симметричности момента от поворота гироузла в одну и другую сторону. Все регулировочные сопротивления выставлены и подобраны в процессе изготовления прибора. Стабилитрон Д10 и сопротивление R29 служат для стабилизации напряжения питания магнитной пружины. Проверку функционирования прибора можно производить только при подключении его к пульту ППВК-90.
VI.Конструктивные особенности прибора и его элементов
Конструктивно прибор состоит из основания (Г) (см. рис. 4), на котором крепятся "гиродатчик (2) с помощью хомутов (8), реле времени (3), исполнительное реле (4), блок (5) импульсных трансформаторов, стабилизатор (6) и пороговое устройство(9).Сверху прибор закрыт крышкой (7). С торцевой стороны прибора установлены штепсельные разъемы Ш1 и Ш2.
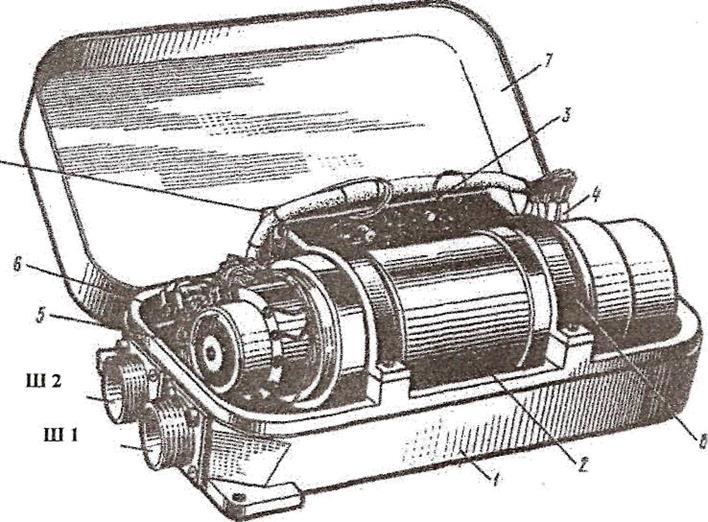
Конструкция прибора (рис.4)
9
1. Основание
2. Гиродатчик
3. Реле времени
4. Исполнительное реле
5. Блок импульсных транс-
форматоров
6. Стабилизатор
7. Крышка
8. Хомут
9. Пороговое устройство
1.Гиродатчик
Принцип работы гиродатчика основан на свойстве гироскопа с двумя степенями свободы совмещать вектор кинетического момента Н (ось собственного вращения) с вектором угловой скорости со вынужденного вращения.
Гиродатчик представляет собой гироскоп с двумя степенями свободы, движение которого вокруг оси, перпендикулярной к оси собственного вращения, ограничено упругой связью.
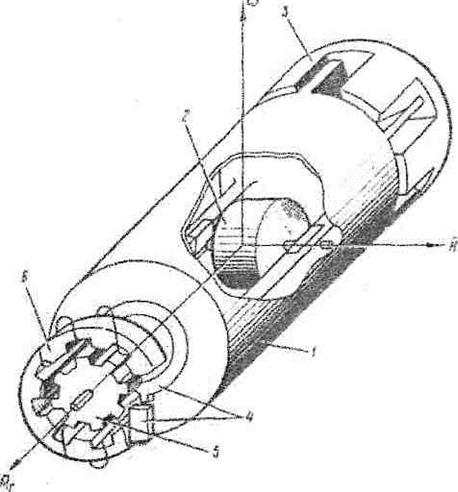 |
Кинематическая схема гиродатчика (Рис.5)
1. Поплавок 4. Магнитная пружина
2. Гиромотор 5. Ротор датчик
3. Демпфер 6. Статор датчика угла
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.