Гиромотор (рис.8)
В поплавке установлен синхронный гиромотор ГМС-0,2М вар. I (рис 8), предназначенный для создания необходимого кинетического момента. Гиромотор представляет собой гистерезисный двигатель обращенного исполнения (статор внутри ротора).
Вращающий момент двигателя создается за счет гистерезиса в материале ротора при перемагничивании его полем статора в процессе пуска и за счет взаимодействия поля статора с намагниченным ротором в рабочем режиме.
4. Демпфер
Принцип действия
демпфера основан на прокачке жидкости, заполняющей гиродатчик через
демпфирующие лопатки 15 (рис 6), укрепленные на поплавке, через зазор 5 между лопатками
и неподвижным статором демпфера. Вязкость жидкости и величина зазора выбраны
так, что обеспечивается требуемое демпфирование при максимальной рабочей
температуре прибора. При понижении температуры вязкость жидкости увеличивается.
Чтобы сохранить демпфирование постоянным, в статоре демпфера 5 имеется дополнительный
паз X, который при максимальной рабочей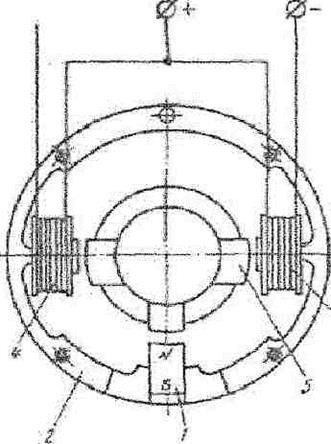 температуре
закрыт регулировочными лопатками 14. С понижением
температуре
закрыт регулировочными лопатками 14. С понижением
температуры жидкость уменьшается в объеме. Магнитная пружина (рис.9) Сильфон 11, компенсируя уменьшение объема
жидкости, растягивается и толкает регулировочные лопатки 14, связанные с сильфоном через плату 20 с помощью ось-винтов 21 .Регулировочные лопатки с помощью фигурного паза открывают ранее закрытый паз λ на столько, чтобы при данной температуре обеспечить постоянное демпфирование.
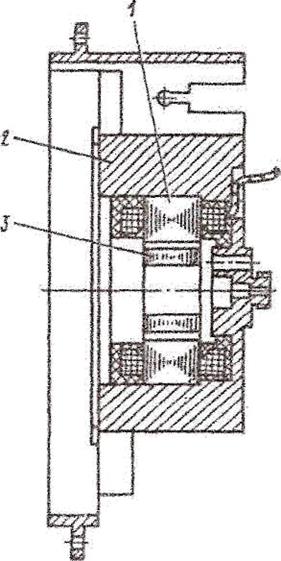
5. Магнитная пружина
Магнитная пружина (см. рис. 9) осуществляет упругую связь гироузла с корпусом
13
гиродатчика. При повороте гироузла на некоторый угол относительно магнита (I) силы магнита, взаимодействуя с ярмом (5), создают момент, пропорциональный углу поворота гироузла и направленный в сторону, противоположную направлению поворота.
Катушки (3) и (4) служат для создания дополнительных магнитных потоков, необходимых для устранения возможной ассиметрии магнитной пружины и получения момента, обеспечивающего заданную чувствительность прибора.
7. Датчик угла
Датчик угла (см.рис. 10) индукционного типа предназначен для преобразования угловых перемещений гироузла относительно корпуса гиродатчика в электрический сигнал.
Датчик угла (рис.10)
Принцип действия датчика угла основан на перераспределении магнитного
потока обмотки возбуждения, пересекающего сигнальную обмотку, вследствие изменения магнитного сопротивления при перемещении ротора относительно статора.
Конструктивно датчик угла состоит из статора (1), неподвижно закрепленного
во фланце (2), и ротора (3).
На статоре расположены обмотки возбуждения (0В) и сигнальная обмотка
(ОС).
14
8. Реле времени
Схема реле времени функционально состоит из трех основных частей:
1) Схемы задержки включения коррекции;
2) Схемы задержки отключения коррекции;
3) Исполнительного устройства.
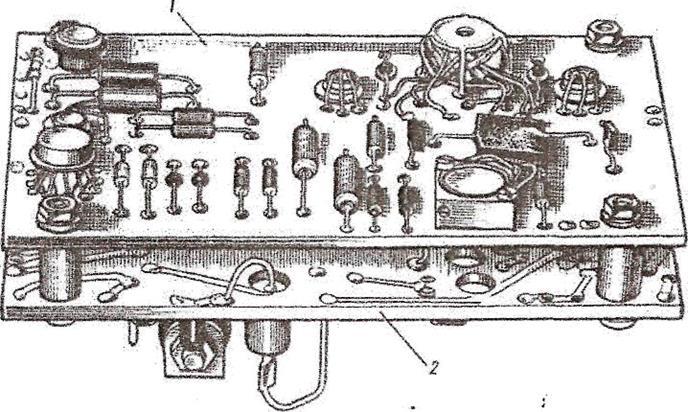
Реле времени и пороговое устройство (Рис. 11)
1-реле времени
2-пороговое
устройство
Схема задержки отключения и включения коррекции принципиально одинаковы.
1) Схема задержки включения коррекции, предназначенная для создания задержки включения коррекции, состоит из:
– Усилитель постоянного тока на транзисторе ПП1.
– Времязадающая цепочка на конденсаторе CI и резисторах R8, R6, R7,
предназначенной для формирования времени задержки включения коррекции
– Электронный ключ на транзисторе ПП2, предназначенный для разряда
конденсатора CI.
– Усилитель постоянного тока на транзисторе 11113, предназначенный для
выдачи сигнала окончания времени задержки включения коррекции.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.