Конструктивно гиродатчик (см. рис. 6) выполнен в виде цилиндрического корпуса (2) с ободками для посадки в основание прибора. Внутри корпуса размещен поплавок (1), подвешенный на миниатюрных шариковых подшипниках и поворачивающийся в них. С одной стороны корпуса размещен статор (5) демпфера, являющийся неподвижной частью демпфера. С другой стороны корпуса крепятся упоры (16), ограничивающие угол поворота поплавка, и фланец (6).
10
Во
фланце неподвижно закреплен статор (7) датчика угла. На фланце также установлены магнитопровод и катушки
магнитной пружины, катушка (18) моментного датчика и панель (3), в пазах
которой находятся токоподводы (8) для подвода питания к гиромотору. Токоподводы
одним концом припаяны к ламелям панели
(3), другим - к контакту (19) с изолирующими втулками,
которые укреплены на поплавке. От ламелей панели (3) к переходникам
(10) по крышке (9) уложены монтажные провода. С этой же стороны корпуса
гиродатчика расположен технологический сильфон (13). Через переходники (10)
осуществляется питание катушки (18) моментного датчика и катушек магнитной пружины.
К корпусу с двух сторон герметично припаяны крышки (9) и (12). Для обеспечения
гидростатической разгрузки опор поплавка, позволяющей снизить
момент трения в подшипниках до незначительной величины, и для обеспечения
требуемого демпфирования вся внутренняя полость корпуса гиродатчика
заполнена специальной жидкостью, представляющей собой смесь двух жидкостей:
ПМС-IP и ПМС-5. Компенсация температурного изменения объема
жидкости в гиродатчике осуществляется сильфоном (11), который управляет также
перемещением регулировочных лопаток (14) демпфирующего устройства. 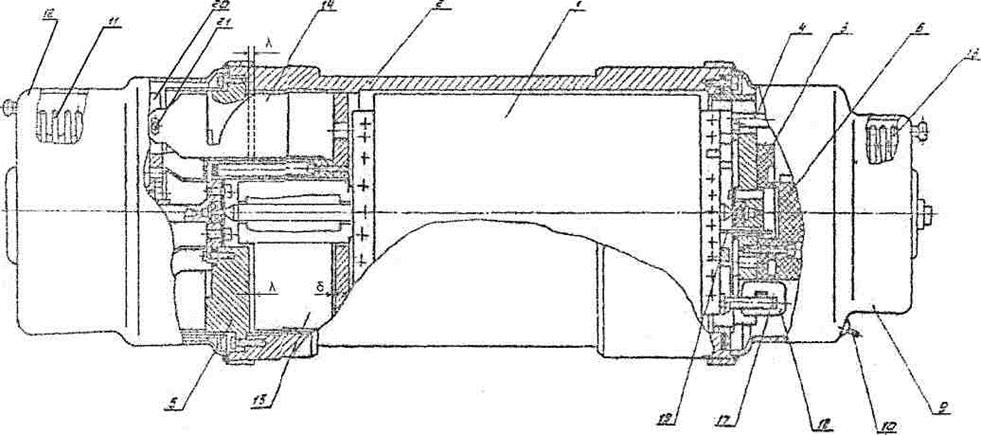
Гиродатчик прибора (рис.6)
1. Поплавок 13. Сильфон
2. Корпус 14. Регулировочные
3. Плата лопатки
4. Центральный контакт 15. Демпфирующие
5. Статор демпфера лопатки
6. Плата 16. Упоры
7. Боковые контакты 17. Якорь
8. Токоподвод 18. Катушка магнит-
9. Крышка ного датчика
10. Переходник 19. Проводник со
11. Сильфон втулкой
12. Крышка 20. Плата
21. Ось-винт
2. Поплавок
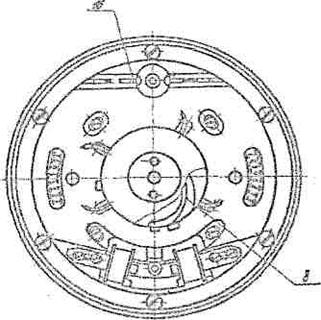
Поплавок (гироузел прибора) представляет собой рамку (2) (см. рис. 7), на которой закреплены гиромотор (1), ярмо (5) магнитной пружины, ротор (3) датчика угла, якорь (6) моментного датчика и демпфирующие лопатки (8). Гиромотор крепится к рамке с помощью накладок (9) и винтов (12). Питание гиромотора осуществляется через контакты, армированные в изолятор (10). Для статической балансировки гироузла имеются балансировочные грузы (13) и винты (14). На ту часть рамки, где располагается гиромотор, надет и герметично припаян к рамке стакан (7). Полученный герметичный цилиндр обеспечивает необходимое взвешивание гироузла в заполняющей гиродатчик жидкости, а также служит для предотвращения попадания жидкости во внутреннюю полость поплавка. Этим исключается разбалансировка гироузла и обеспечивается нормальная работа гиромотора. Для подвески гироузла в подшипниках рамка имеет цапфы-опоры.
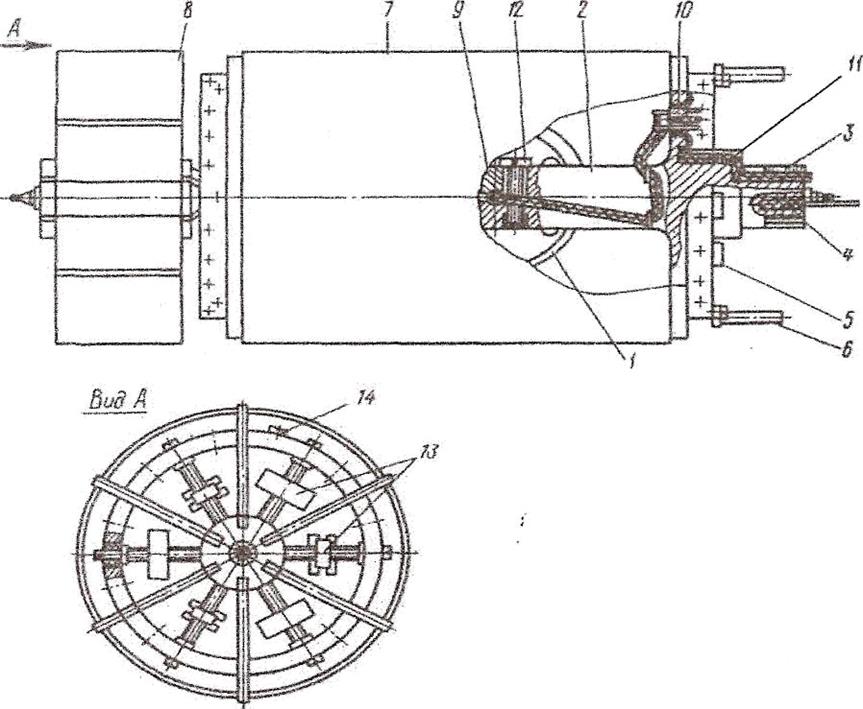
Поплавок прибора (рис 7)
1. Гиромотор
2. Рамка
3. Ротор датчика угла
4. Контакт
8 . Демпфирующая лопатка
9. Накладка
10. Изолятор
11. Монтажный провод
5. Ярмо магнитной пружины
6. Якорь моментного датчика 7. Стакан
12. Винт
13. Балансировочный груз
14. Балансировочный винт
12
3. Гиромотор
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.