Градиенты навигационных функций являются размерными величинами в зависимости от размерности самой функции. Если функция навигационного параметра представлена в сферических полярных координатах r и y, то главными компонентами градиента в этих координатах будут составляющие вдоль радиуса r и по нормали к нему. На рисунке показаны такие составляющие на сфере с полюсом сферических координат в точке PN. Модуль составляющей gj, изменяется в зависимости от сферического радиуса или, что то же самое, от центрального угла r. Здесь действует непосредственная аналогия с длиной дуги параллели, только угол «параллели» отсчитывается не от экватора или любого другого большого круга, а от полюса.
Модуль градиента не зависит от выбора системы координат и определяется выражением:
![]() (23)
(23)
Решение задачи определения
координат обсервованного места судна обобщенным методом линий положения
предусматривает предварительное вычисление составляющих градиента. В этом
случае коэффициенты уравнений типа  (24) станут
известны, и задача определения места судна путем решения систем таких уравнений
формально будет решена.
(24) станут
известны, и задача определения места судна путем решения систем таких уравнений
формально будет решена.
При предварительном расчёте градиента преследуются две цели:
во-первых, открывается поле широкого теоретического исследования различных навигационных функций, во-вторых, для практического решения заранее готовится массив коэффициентов уравнений ЛП.
В случае конкретных измерений тех или иных навигационных параметров делается выборка соответствующих значений градиентов для решения общей задачи определения места судна.
Модуль градиента:
 (25)
(25)
Отсюда следует, что модуль градиента - есть характеристика связи линейного смещения линии положения на поверхности и изменения навигационного параметра.
Исходя изданного определения сравнительно несложно получить формулы модуля градиента и определить его размерность для различных навигационных изолиний. Так как градиент всегда направлен в сторону увеличения параметра по нормали к изолинии (т. е. перпендикулярно ЛП), то нетрудно установить и его ориентацию. Следовательно, будут определены все элементы линии положения.
Если в уравнении (24) обе
части поделить на модуль градиента (Uo - Uc)/g = DU/g и сопоставить это с формулой  , то можно получить строгое
определение модуля градиента:
, то можно получить строгое
определение модуля градиента:
 (26)
(26)
То есть бесконечно малому приращению навигационного параметра dU соответствует бесконечно малое приращение dn смещения линии положения по нормали к изолинии. Смещение Dn называют переносом линии положения из счислимого места в обсервованное,
Dn = DU/g = (Uo – Uc)/g. (27)
Соответственно и уравнение ЛП теперь можно записать, используя понятие переноса, следующим образом:
costDj + sintDw =Dn. (28)
Такая форма широко распространена при графоаналитических способах решения задачи определения места судна, например в мореходной астрономии. Величины Dn и t называются элементами линий положения.
Рассмотрим некоторые
частные градиенты. 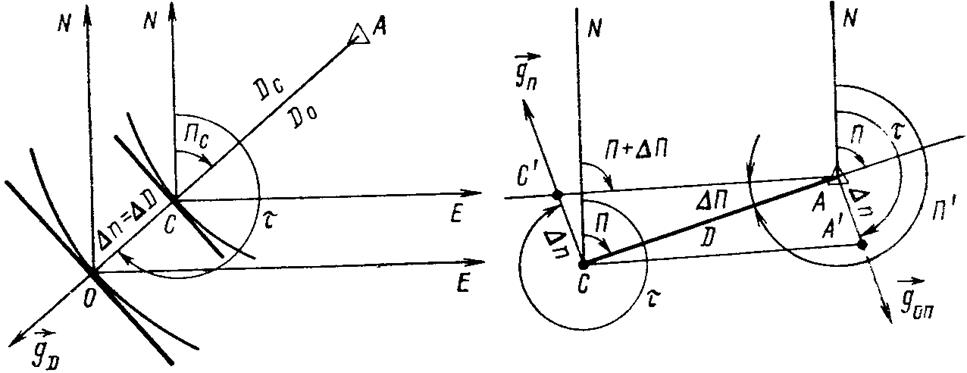
Рис. 12. Градиент расстояния на плоскости Рис. 6.1'8. .Градиенты прямого и об ратного пеленгов
Градиент расстояния на плоскости (рис. 12). Пусть измерено расстояние Do и из счислимой точки С с карты снято счислимое значение Dc. Приращение навигационного параметра DU = DD, а смещение ЛП Dn = DD, следовательно, по формуле gD = l. Модуль градиента расстояния безразмерен, так как приращение параметра выражается в тех же единицах (милях, кабельтовых), что и смещение ЛП. Направлен градиент расстояния всегда вдоль счислимого пеленга в сторону увеличения дистанции: t = П±180°. Знак «+» принимается при П<180°, знак «—» при П>180°.
Градиенты прямого и обратного пеленгов на плоскости(рис. 13). Измерен пеленг П с судна на ориентир в пределах малых расстояний. Такой пеленг называется прямым или просто пеленгом, а пеленг с маяка на судно П’=П+1800 - обратным пеленгом.
Сначала рассмотрим прямую задачу. Приращение пеленга означает его поворот на малый угол DП. В результате такого разворота происходит кажущееся смещение счислимой точки С в положение C’ на значение переноса Dn. Из прямоугольного треугольника АСС' получим значение этого переноса: Dn =D*tgDП. Вследствие малости приращения пеленга DП можно приближенно принять вместо тангенса его собственный угол в радианах: tgDП»DП, тогда Dn=DDП.
Отсюда градиент
gп=DП/(DПD)=1/D рад/миля. (29)
Так как на практике пеленг выражается в градусах, эту формулу применяют в другой размерности (...о/миля):
gn = 57,37о/D.
Значит, чем дальше судно от ориентира, тем больше его линейное смещение перпендикулярно пеленгу при одном и том же приращении пеленга: Dn = DDП.
Направление градиента пеленга в круговом счете всегда определяется равенством
t = П - 90°. (30)
Рассмотрим обратный пеленг. Для этого на рис. 13 достаточно перенести отсчет пеленгов в точку Л. Приращение пеленга DП и смещение счислимого места Dn остаются прежними. Однако видно, что увеличение отсчета пеленга происходит в обратную сторону. Следовательно, направление градиента теперь следует также изменить на противоположное:
t = П+90°, (31)
Градиент горизонтального угла (рис. 14). Горизонтальный угол a, изолиния которого является окружностью, на которую опирается этот угол, можно рассматривать как разность пеленгов двух ориентиров А и В. Это дает основание рассчитывать градиент горизонтального угла как разность векторов градиентов пеленгов каждого ориентира:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.