Изолиния разности расстояний на сфере. Обозначим символом а расстояние на поверхности Земли между ориентирами А и В. Это расстояние называется базой.
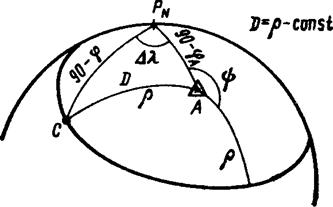
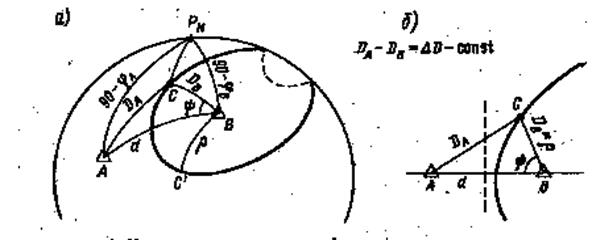
Рис.5 Сферическая изостадия Рис.6 Изолиния разности расстояний
Уравнение плоской гиперболы в полярных координатах:
r = (d2 - DD2)/(2*(DD + d*cosy)) (10)
Отличие сферической гиперболы от плоской - в силу всегда соблюдаемого неравенства DD<d существуют условия, при которых радиус r плоской гиперболы неограниченно возрастает, и ее ветви уходят в бесконечность. Однако для сферической гиперболы таких условий нет, поэтому r®90°.
Следовательно, изолиния разности расстояний на сфере в отличие от изолинии на плоскости есть всегда замкнутая ограниченная кривая.
Для определения места судна необходимо измерить, как минимум два навигационных параметра U1 и U2 изолинии которых имеют общую точку пересечения O с координатами jo и lо
U1 = f1(jo, lо)
U2 = f2(jo, lо)
Такая точка называется обсервованным местом судна, а широта jo и долгота lо - обсервованными координатами.
Возможны два пути решения данной задачи: графический и аналитический.
Графическое решение заключается в построениина карте участков навигационных изолиний в предполагаемом месте судна. Обычно такой точкой является счислимое место судна С, определенное по лагу и компасу после внесения всех предполагаемых поправок. Данный способ удобен для штурманской практики и дает быстрое и наглядное решение прямо на путевой карте. Проложив два пеленга или два расстояния или пеленг и расстояние посредством штурманского прокладочного инструмента, находят точку пересечения изолиний и при необходимости снимают координаты этой точки с рамок карт.
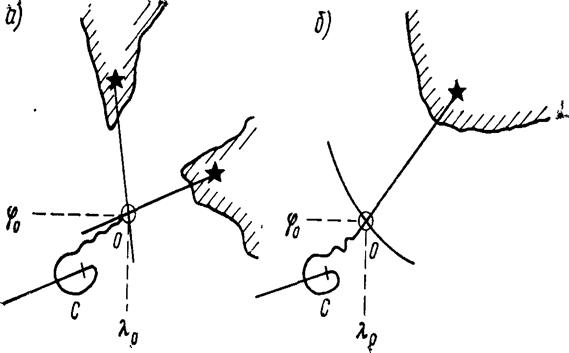
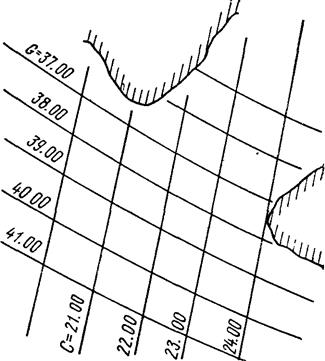
Рис.8. Графическое определение места судна Рис.9 Сетка навигационных изолиний.
При плавании в узкостях или других стесненных районах плавания иногда предварительно строят сетку навигационных изолиний, по которой можно оценивать место без прокладки, если на сетке нанесена оцифровка значений навигационных параметров. Довольно распространен способ направляющей изолинии, когда удается совместить изолинию навигационного параметра с направлением пути судна.
При всех достоинствах графического способа определения места он доступен лишь для простых по форме изолиний и по своей сути индивидуален для каждого типа навигационного параметра. Во время плавания судоводители не в состоянии строить такие сложные навигационные изолинии, как ортодромии изостадии, изопеленги и гиперболы на картах меркаторской проекции. Для разностно-дальномерных РНС выпускают специальные карты с нанесенной сеткой изолиний, где место судна находят путем линейной интерполяции между значениями навигационного параметра. Однако в целом, учитывая и время измерения параметра, графическая процедура обсервации продолжительна и, главное, плохо поддается формализации для того, чтобы ее можно было автоматизировать.
Аналитический путьрешения задачи определения места судна исходя из уравнений общего вида
U1 = f1(jo, lо) (9)
U2 = f2(jo, lо)
на первый взгляд выгодно отличается от графического решения своей универсальностью. С формальной точки зрения, необходимо наити корни системы двух уравнений, т. е. решить обращенную систему вида
jо = F1(Uo1, Uo2) (10)
lo = F2(Uo1, Uo2)
Единственное строгое требование здесь заключается в непрерывности функций U1 и U2 заданных фиксированными значениями Uo1 ,Uо2. Однако в реализациях такого подхода и появляются главные трудности прямого аналитического метода.
Решение данных систем, в которых невозможно получить однозначные решения уже в силу периодического характера функций искомых величин, довольно сложная задача. Кроме того, после приведения этих уравнений обнаруживается их трансцендентный характер, при котором искомые координаты присутствуют в неявном виде, скрываясь под круговыми функциями со сложными аргументами.
Таким образом, недостатками прямого аналитического метода являются:
а) невозможность получения однозначного решения в силу периодичности функций искомых величин;
б) трудность получения результатов в явном виде относительно обсервованных координат.
Все это вместе не позволяет добиться решения без какого-либо начального приближения даже при использовании современных высокоэффективных численных методов. Таким образом, становится совершенно очевидным единственный вариант реализации аналитического метода в судовых средствах вычислительной техники: провести линеаризацию исходных уравнений в окрестностях какой-либо точки, которая может играть роль достаточно обоснованного начального приближения места судна. Только тогда аналитическое решение задачи определения места судна, обладая высокой универсальностью, необходимой, прежде всего в навигационных автоматизированных комплексах, приобретает реальное, надежное и эффективное математическое обоснование.
 Прямое аналитическое
решение таких задач сводится к (10) и имеет достаточно сложный вид даже для
простых навигационных функций. Рассмотрим задачу определение места по двум пеленгам на плоскости.
Прямое аналитическое
решение таких задач сводится к (10) и имеет достаточно сложный вид даже для
простых навигационных функций. Рассмотрим задачу определение места по двум пеленгам на плоскости.
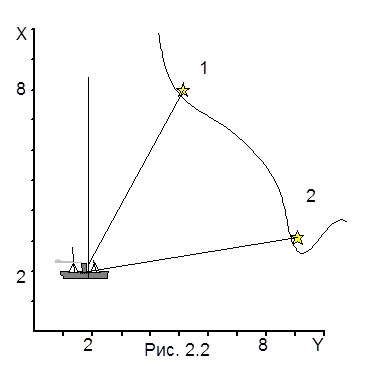
Система 9, в соответствии с Рис 2.2 будет иметь вид:
tgП1= tgП2=
tgП2=
|
|
Т1(х1–х0)-y1 = Т2(х1–х0)–y2;
х0=(Т2х2-Т1х1+y1–y2)/(Т2-Т1);
y0=(Т1Т2(х2-х1)+Т2y1–Т1y1)/(Т2-Т1);
пусть П1=30°, П2=82°, тогда
х0=(tg(82°)*3-tg(30°)*8+5-9)/(tg(82°)-tg(30°))=1.95 мили
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.