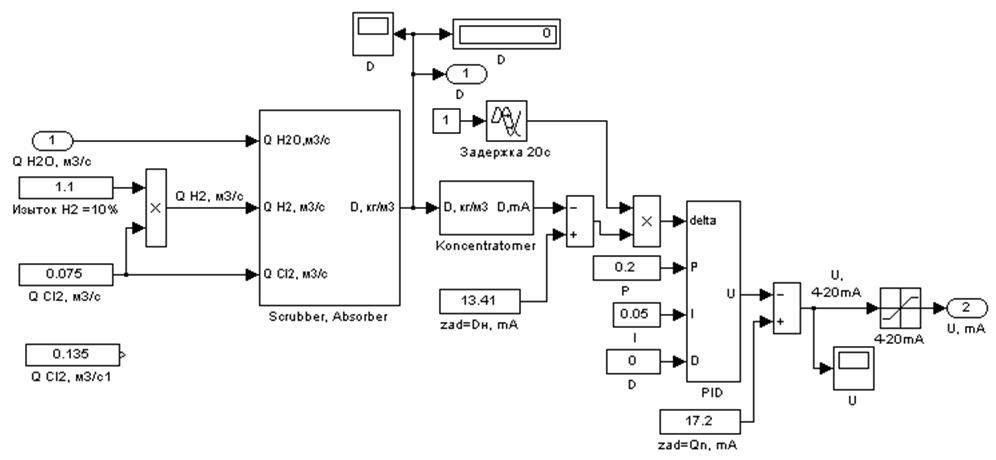
Рисунок 2.23 – Модель САР концентрации
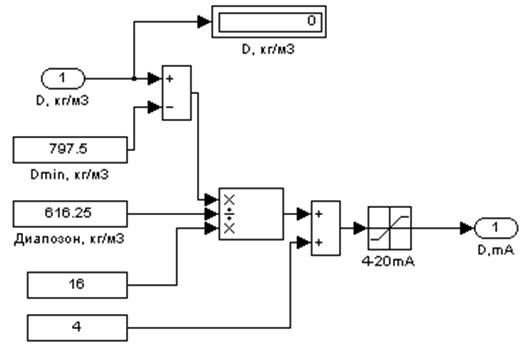
Рисунок 2.24 – Блок Koncentratomer
Блок PID представлен на рисунке 2.9.
Блок zad=Dn представляет собой номинальное значение плотности соляной кислоты, выраженное в mA. Результат суммирования этого значения с сигналом от ПИД-регулятора представляет собой сигнал управления на позиционер (U, mA).
Блок zad=Qn (рисунок 2.23) формирует задающий сигнал, подаваемый на систему каскадного регулирования, соответствующий номинальному значению расхода, выраженный в миллиамперах.
2.6.5.5 Результаты моделирования
Исследование модели происходило по переходным процессам (рисунки 2.25..2.28).
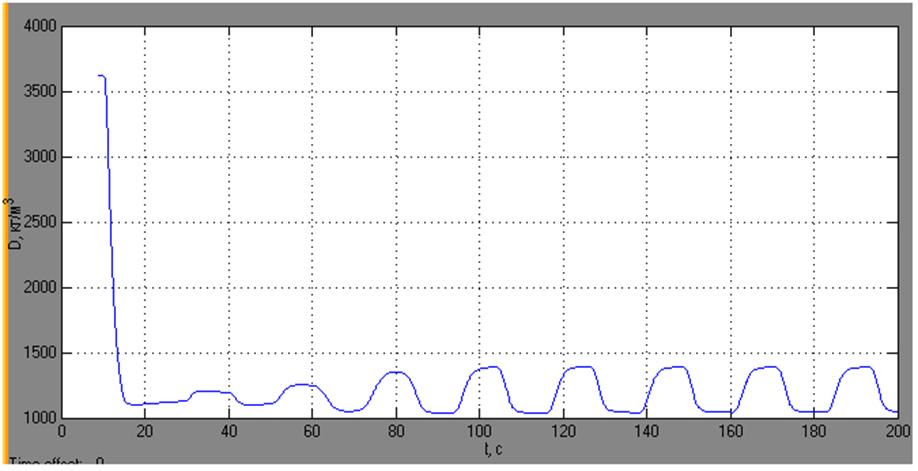
Рисунок 2.25 – Переходный процесс при настройке P=1; I=0; D=0
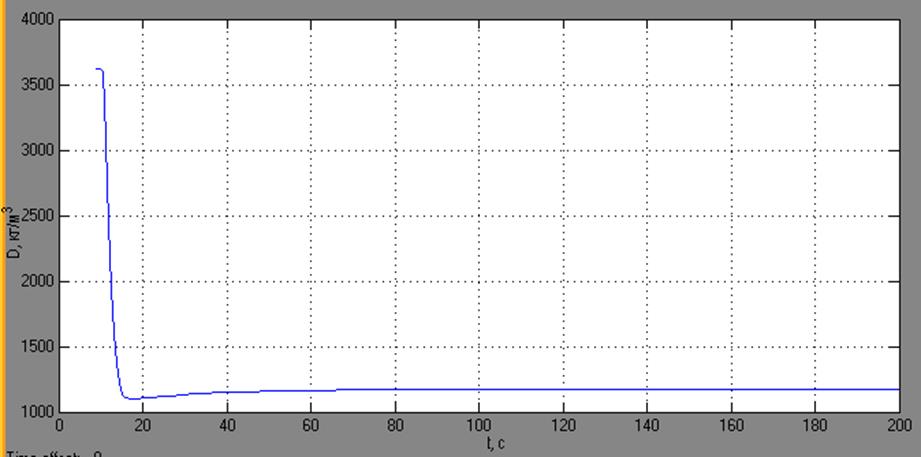
Рисунок 2.26 – Переходный процесс при настройке P=0,1; I=0; D=0
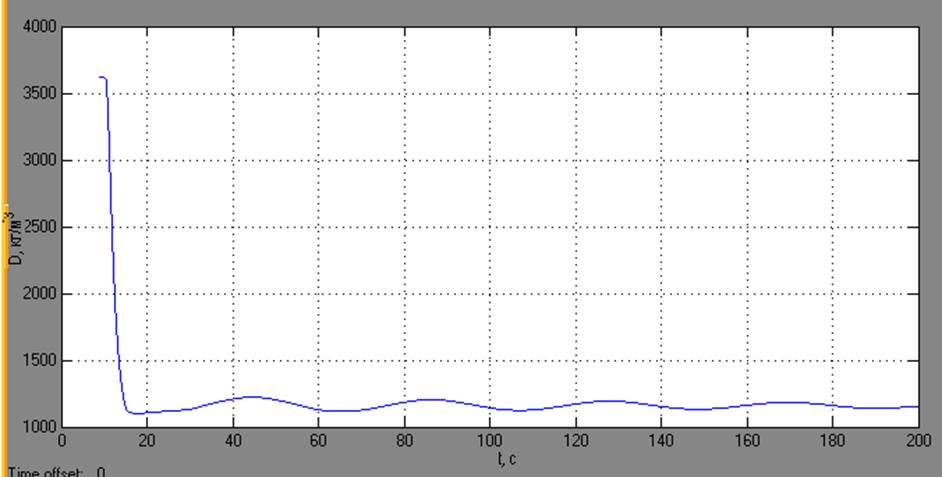
Рисунок 2.27 – Переходный процесс при настройке P=0,1; I=0,1; D=0
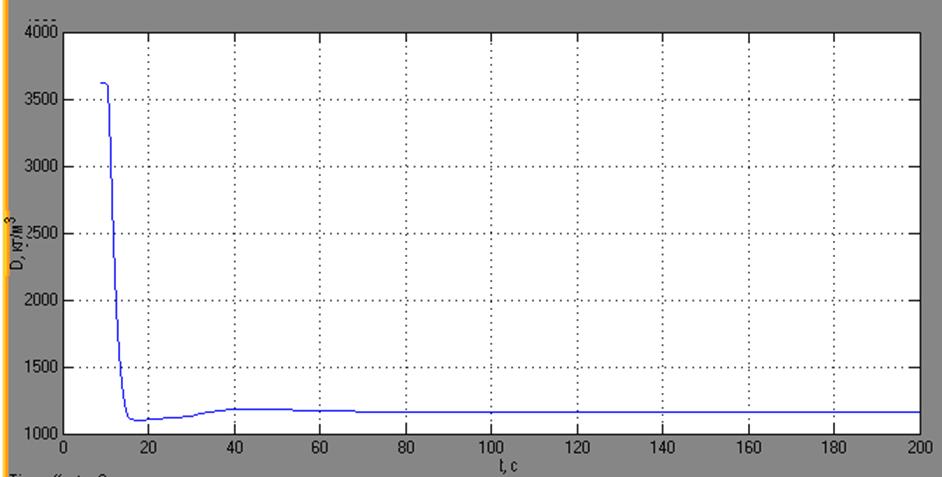
Рисунок 2.28 – Переходный процесс при настройке P=0,2; I=0,05; D=0
Результаты исследований модели представлены в таблице 2.11.
Таблица 2.11 – Результаты исследований модели
|
P |
I |
D |
Время регули-рования |
Перерегу-лирование, % |
Статичес- кая ошибка, % |
Примечания |
|
1 |
0 |
0 |
– |
– |
– |
Незатухающие колебания |
|
0,1 |
0 |
0 |
34,3 |
2,72 |
38,1 |
Большая статическая ошибка |
|
0,1 |
0,1 |
0 |
– |
– |
– |
Незатухающие колебания меньшей амплитуды |
|
0,2 |
0,05 |
0 |
39,4 |
0,02 |
0,3 |
2.6.5.6 Обсуждение результатов моделирования
В результате проведенных исследований можно сделать следующие выводы:
- приемлемым регулятором можно считать ПИ-регулятор;
- приемлемыми параметрами настройки можно считать: P = 0,2, I = 0,05.
2.6.6 Расчет надежности контура регулирования
Для расчета выберем контур регулирования расхода обессоленной воды (функциональная схема – рисунок 2.29).
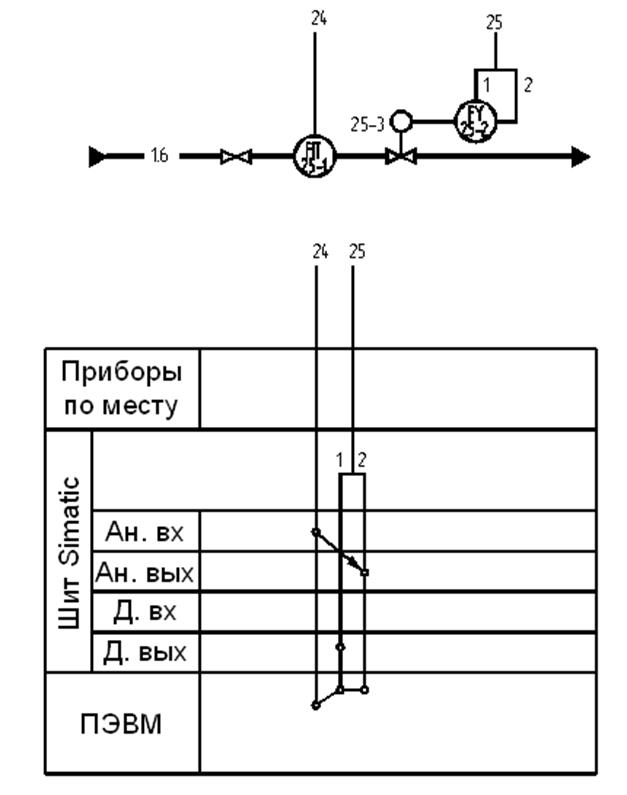
Рисунок 2.29 – Функциональная схема регулирования расхода
|
|
|

Рисунок 2.30 – Структурная схема надёжности (ССН)
Вероятность безотказной работы определяется по экспоненциальному закону:
![]() , (2.29)
, (2.29)
где ![]() –
интенсивность отказов
–
интенсивность отказов ![]() элемента;
элемента;
![]() –
время, примем
–
время, примем ![]() .
.
Определим вероятность безотказной работы для каждого элемента:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
В случае применения резервированного CPU.
Вероятность безотказной работы, ![]() , определяется по формуле [45]:
, определяется по формуле [45]:
 . (2.30)
. (2.30)
Рассчитаем вероятность безотказной работы резервированного CPU
 .
.
Вероятность безотказной работы системы, состоящей из последовательно соединенных элементов, определяется по формуле
 , (2.31)
, (2.31)
где ![]() -
вероятность для каждого элемента;
-
вероятность для каждого элемента;
![]() -
количество элементов.
-
количество элементов.
Преобразуем структурную схему надежности (рисунок 2.31).
Рисунок 2.31 – Преобразованная ССН
Рассчитаем вероятность безотказной работы
децентрализованной периферии, ![]() по формуле 2.31.
по формуле 2.31.
![]()
В случае применения резервированного CPU с
коммутируемой децентрализованной периферией вероятность безотказной работы, ![]() , определяется
по формуле [45]:
, определяется
по формуле [45]:
 . (2.32)
. (2.32)
Рассчитаем вероятность безотказной работы CPU с коммутируемой децентрализованной периферией
 .
.
Рассчитаем вероятность безотказной работы всей системы
![]() .
.
Вероятность безотказной работы ![]() больше 0,9, значит, система
удовлетворяет современным требованиям надежности.
больше 0,9, значит, система
удовлетворяет современным требованиям надежности.
По вероятности безотказной работы всей системы рассчитаем суммарную интенсивность отказов
 , (2.33)
, (2.33)
 .
.
Рассчитаем среднюю наработку до первого отказа
 , (2.34)
, (2.34)
 .
.
Вероятность безотказной работы в течение определённого промежутка времени t (рисунок 2.32)
![]() ;
;
Рисунок 2.32 – Вероятность безотказной работы
2.7 Выбор информационного и программного обеспечения
2.7.1 Обоснование выбора системы
При выборе системы управления следует учитывать следующие характеристики:
- технические характеристики;
- стоимостные характеристики;
- эксплуатационные характеристики.
Технические характеристики в основном следующие:
- программно-аппаратная платформа для SCADA-системы;
- имеющиеся средства сетевой поддержки;
- встроенные командные языки;
- поддерживаемые базы данных;
- графические возможности.
Программно-аппаратные требования к системе описаны в п.2.7.2 и п.2.7.4.3.
Возможности организации сетевой архитектуры позволяют реализовать с использование любой сетевой конфигурации.
Встроенные командные языки:
- собственный язык программирования контроллера STEP7;
- поддержка языков С и Visual Basic SCADA-системой.
Реализация баз данных осуществляется с поддержкой современной технологии SQL. Графические возможности по сравнению с аналогами ведущих производителей SCADA несколько опережают своих конкурентов.
Кроме того необходимо отметить, что STEP7 является пожалуй единственной системой для конфигурирования и программирования контроллеров. А использование пакета PCS7, включающего в себя SCADA-систему WinCC расширяет возможности по созданию программного обеспечения.
При оценке стоимости SCADA-систем нужно учитывать следующие факторы:
- стоимость программно-аппаратной платформы;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.