Дифференциальное уравнение, описывающее объект, будет иметь вид
 . (2.17)
. (2.17)
В соответствии с (2.17) запишем передаточную функцию объекта
 . (2.18)
. (2.18)
2.6.4.3 Инструментальная модель объекта регулирования
Реализовать модель будем в пакете MATLAB, при этом воспользуемся инструментом визуального моделирования SIMULINK.
Инструментальная модель объекта регулирования представлена на рисунке 2.5.
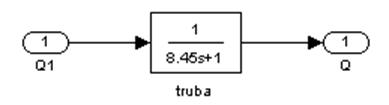
Рисунок 2.5 – Инструментальная модель трубопровода
2.6.4.4 Модель системы автоматического регулирования расхода
Структурная схема САР расхода представлена на рисунке 2.6.
Рисунок 2.6 – Структурная схема САР расхода
Условные обозначения, отображенные на рисунке, расшифровываются ниже.
ОР – объект регулирования;
СУ – согласующее устройство;
НО – нуль орган;
ПИД – ПИД-регулятор;
ИМ – исполнительный механизм;
РО – регулирующий орган;
![]() – величина
возмущающего воздействия (расход воды на входе);
– величина
возмущающего воздействия (расход воды на входе);
![]() –
величина регулируемого параметра (расход воды на выходе);
–
величина регулируемого параметра (расход воды на выходе);
∆– сигнал рассогласования;
U – сигнал регулятора;
P1– давление перед регулирующим органом;
![]() – степень
открытия клапана;
– степень
открытия клапана;
З – задатчик.
В соответствии со структурной схемой разработаем модель САР расхода (рисунок 2.7).
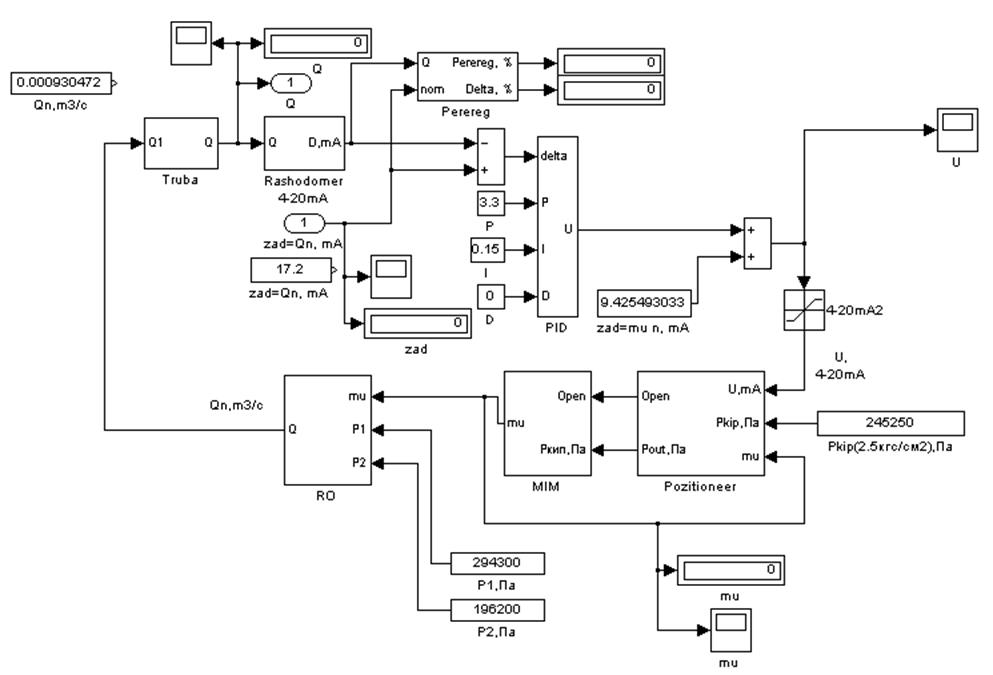
Рисунок 2.7 – Модель САР расхода
Блок Truba представлен на рисунке 2.5.
Блок Rashodomer представлен на рисунке 2.8. И представляет собой инструментальную модель расходомера. На выходе блока формируется сигнал 4-20мА, в соответствии с пределами измерений расходомера (0–0,0010277м3/с).
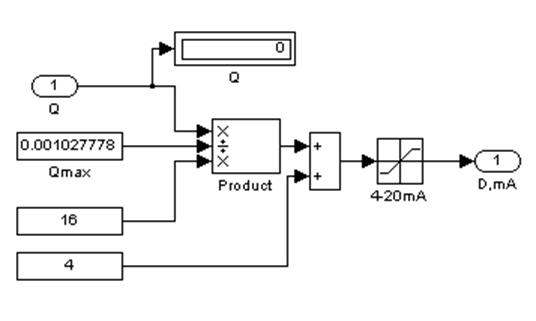
Рисунок 2.8 – Блок Rashodomer
Блок PID представлен на рисунке 2.9. И представляет собой модель ПИД–регулятора. На выходе блока формируется сигнал 4-20мА. Блок реализует передаточную функцию
 . (2.19)
. (2.19)
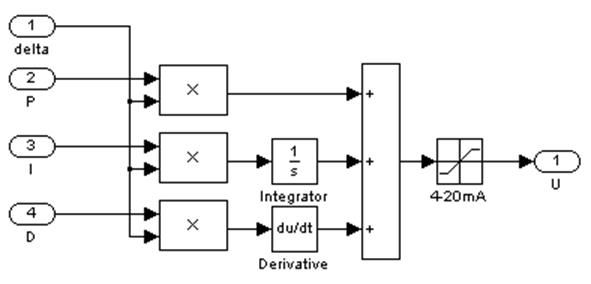
Рисунок 2.9 – Блок PID
Блок zad=mun представляет собой номинальное значение степени открытия клапана, выраженное в mA. Результат суммирования этого значения с сигналом от ПИД-регулятора представляет собой сигнал управления на позиционер (U, mA).
Блок Pozitioneer представлен на рисунке 2.10. И представляет собой модель позиционера. На выходе блока формируются сигнал «открыт/закрыт», давление воздуха на притоке к МИМ. Принцип действия позиционера следующий: при отклонении сигнала задания от текущей степени открытия клапана на величину большую, чем зона нечувствительности, позиционер либо подает воздух на МИМ, либо выпускает в атмосферу. Блок Relay исполняет роль зоны нечувствительности позиционера, в которой положение клапана не будет изменяться.
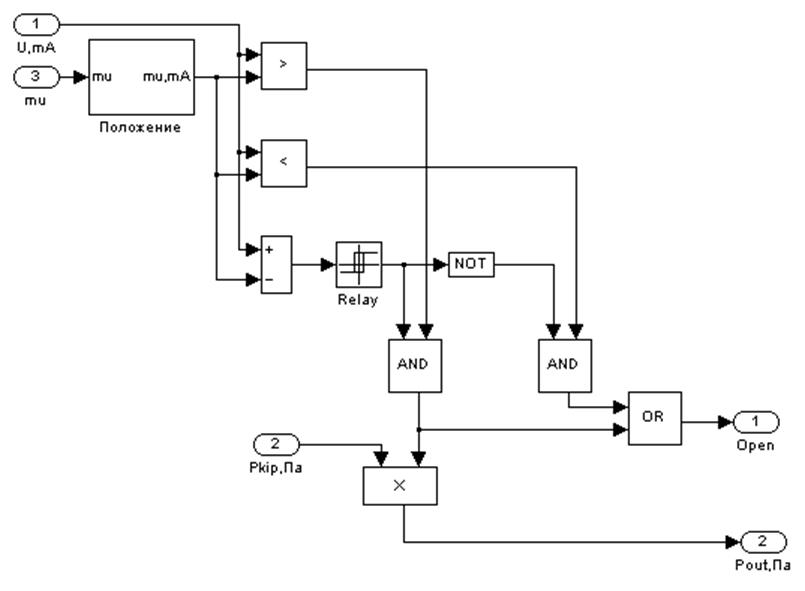
Рисунок 2.10 – Блок Pozitioneer
Блок Положение представлен на рисунке 2.11. И представляет собой модель датчика положения. На выходе блока формируются сигнал – степень открытия клапана, выраженный в миллиамперах.
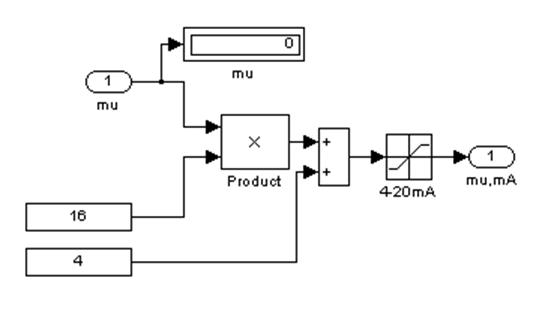
Рисунок 2.11 – Блок Положение
Блок MIM представлен на рисунке 2.12. И представляет собой модель исполнительного механизма. На выходе блока формируется степень открытия штока. В зависимости от расхода (приток или отток) воздуха на МИМ (Q) изменяется нормальный объем воздуха в МИМ (Vnorm). В зависимости от величины объема воздуха изменяется давление в ИМ (Pmim), как следствие – степень открытия клапана (mu).
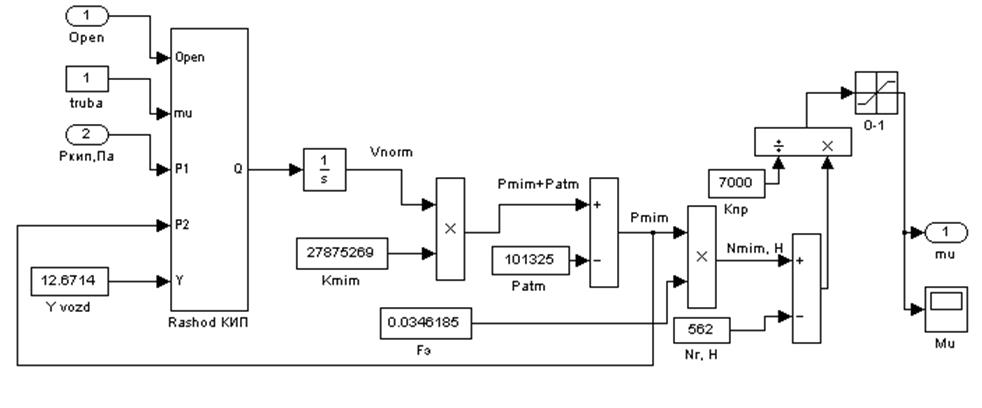
Рисунок 2.12 – Блок MIM
Блок Rashod КИП представлен на рисунке 2.13. На выходе блока формируется параметр – расход воздуха КИПиА через позиционер.
Блок RO представлен на рисунке 2.14. И представляет собой модель регулирующего органа. На выходе блока формируется расход воды, через регулирующий орган. Расход зависит от давления на входе РО (P1), давления на выходе РО (P2) и степени открытия клапана (mu).
Блок Rashod voda представлен на рисунке 2.15. На выходе блока формируются сигнал – расход воды, через регулирующий орган.
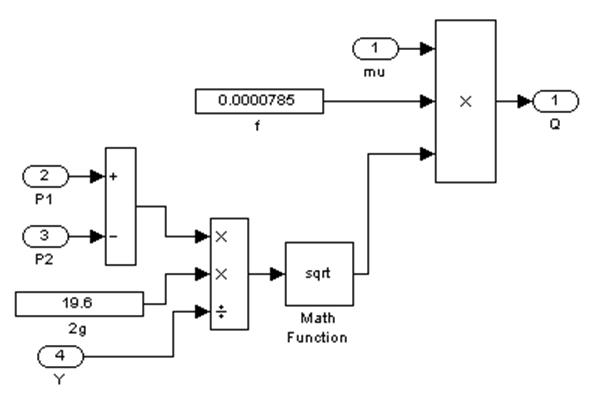
Рисунок 2.13 – Блок Rashod КИП
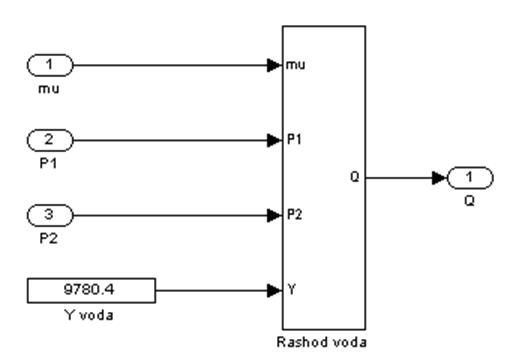
Рисунок 2.14 – Блок RO
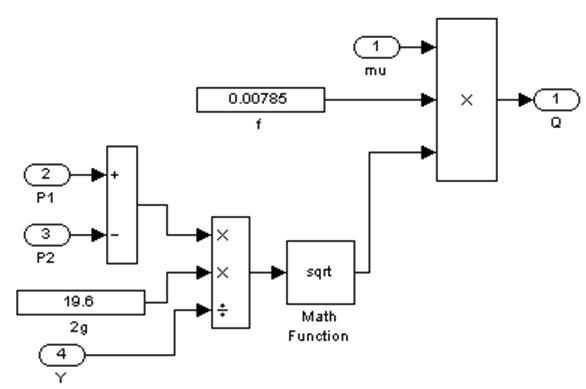
Рисунок 2.15 – Блок Rashod voda
Блок zad=Qn (рисунок 2.7) формирует задающий сигнал, подаваемый на нуль орган (сумматор), соответствующий номинальному значению расхода, выраженный в миллиамперах.
Блок Perereg (рисунок 2.7) рассчитывает перерегулирование и статическую ошибку переходного процесса. Является информативным во время исследования модели системы.
2.6.4.5 Результаты моделирования
Исследование модели происходило по переходным процессам (рисунки 2.16..2.19). В связи с тем, что задание для регулятора может изменяться (регулятор находится в составе каскадного регулятора), проводилось исследование при различных значениях задатчика (максимальным и минимальным [23]).
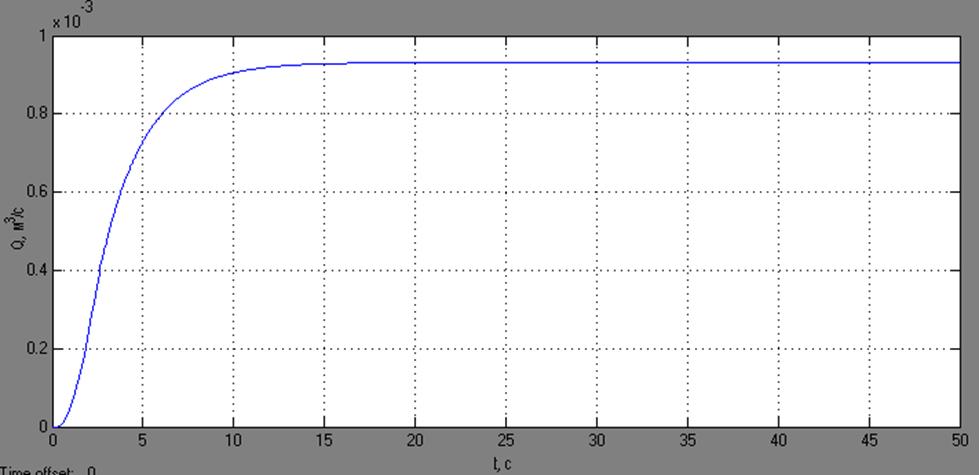
Рисунок 2.16 – Переходный процесс при настройке P=1; I=0; D=0
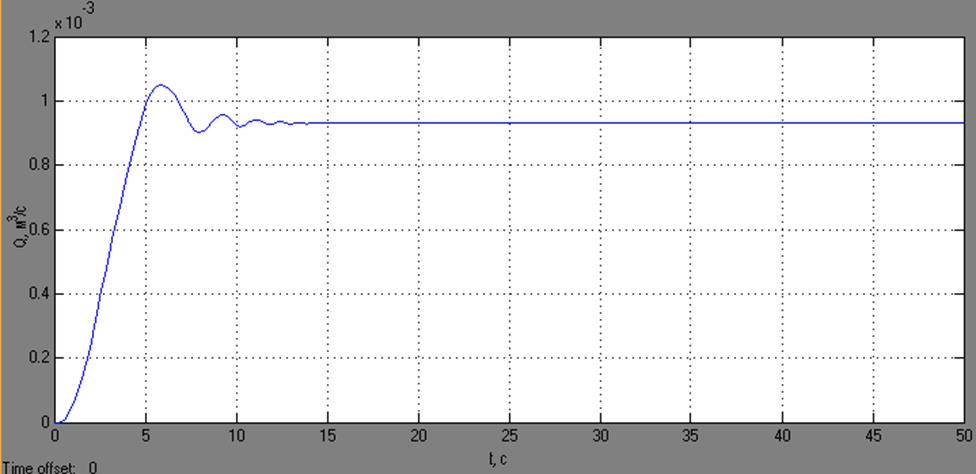
Рисунок 2.17 – Переходный процесс при настройке P=15; I=0; D=0
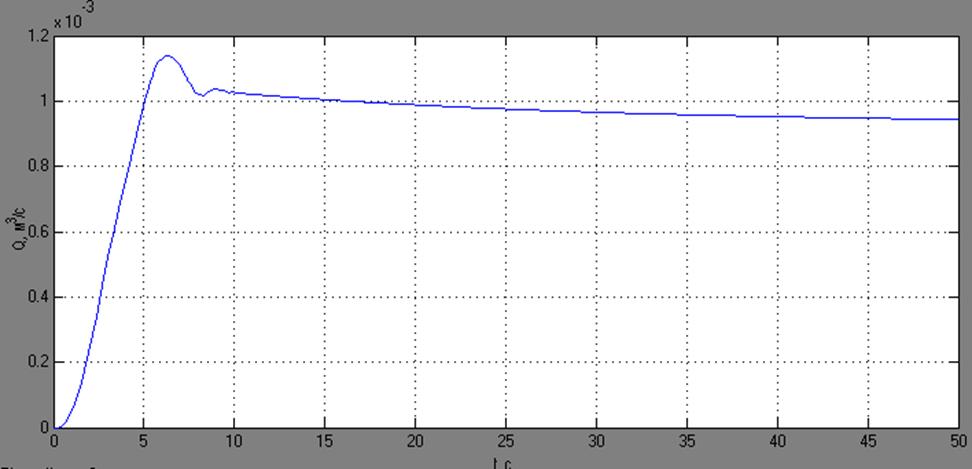
Рисунок 2.18 – Переходный процесс при настройке P=10; I=0,5; D=0
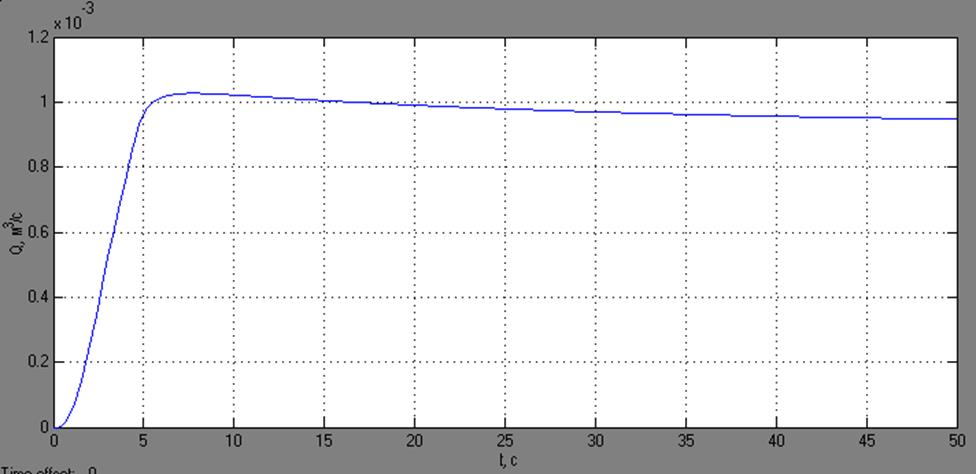
Рисунок 2.19 – Переходный процесс при настройке P=3,3; I=0,15; D=0
Результаты исследований модели представлены в таблице 2.8.
Таблица 2.8 – Результаты исследований модели
|
P |
I |
D |
Время регули-рования |
Перерегу-лирование, % |
Статичес- кая ошибка, % |
Примечания |
|
1 |
0 |
0 |
– |
0 |
6,3 |
Большая статическая ошибка |
|
15 |
0 |
0 |
9,5 |
12,54 |
2,5 |
Наблюдаются затухающие колебания частоты |
|
15 |
0,5 |
0 |
17,5 |
20,81 |
≈ 0 |
Сильно затухающие колебания, большое значение перерегулирования |
|
3,3 |
0,15 |
0 |
17,9 |
0,10 |
≈ 0 |
Отсутствует статическая ошибка |
2.6.4.6 Обсуждение результатов моделирования
В результате проведенных исследований можно сделать выводы:
- приемлемым регулятором можно считать ПИ-регулятор;
- приемлемыми параметрами настройки можно считать: P = 3,3, I = 0,15.
2.6.5 Моделирование системы автоматического регулирования концентрации соляной кислоты
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.