В РАТЕГ04 реализованы модели клапанов и/или задвижек следующего типа:
· Безсигнальный инерционный.
· Односигнальный безинерционный.
· Двухсигнальный инерционный.
· Сервоклапан (Задвижка).
Безсигнальный инерционный клапан управляется местными условиями (перепадом давления, направлением течения и др.). Для каждого такого клапана определяется начальное состояние (открыт/закрыт), перепад давления открытия, перепад давления закрытия, время закрытия и время открытия. При промежуточных перепадах давления проходное сечение клапана не меняется. Модели клапанов такого типа могут моделировать обратные клапаны, предохранительные и др.
Односигнальный безинерционный клапан управляется одним сигналом. В зависимости от значения сигнала клапан находится в закрытом или открытом состоянии. При его задании для него определяется управляющий триггер типа 1 (смотри раздел 2.4.7).
Двухсигнальный инерционный клапан позволяет учесть гистерезис в зависимости проходного сечения от управляющего параметра (например, от давления). Для этого клапана определяются: управляющий триггер типа 2 (или два триггера типа 1), начальное состояние (открыт/закрыт), время открытия и время закрытия.
Сервоклапан меняет сечение в соответствии с показаниями датчиков (см. раздел 2.4.7).
В РАТЕГ существуют так называемые управляемые элементы (насосы, клапаны, и др.) состояние (параметры) которых могут меняться в соответствии с сигналами системы контроля и управления (СКУ). Эти сигналы могут меняться дискретно (состояние триггеров) или непрерывно (сигналы датчиков или регуляторов).
Общая схема управления приведена на Рис. 2.11. Информация, выдаваемая датчиками (показания датчиков), перерабатывается и анализируется контрольным блоком управляемого элемента. В соответствии со сценарием управления контрольный блок меняет состояние управляющего триггера и/или вырабатывает сигнал управляющего датчика или регулятора. Исполнительный механизм управляемого элемента системы на каждом временном шаге просматривает состояние своих управляющих триггеров и/или получает сигнал управляющего датчика или регулятора и по этой информации выполняет определенные действия. Например, исполнительный механизм насоса при изменении состояния своего управляющего триггера включает/отключает насос, а по сигналам датчика или регулятора меняет обороты насоса.

Рис. 2.11 Схема управления управляемым элементом
Рассмотрим подробнее элементы, из которых строится модель СКУ.
СКУ работает с так называемыми контрольными параметрами. Контрольные параметры это идентификаторы, определяющие: параметры оборудования (текущее сечение клапана, скорость вращения насоса, мощность нагревателей и др.); состояние теплоносителя (давление, температура, паросодержание, и др.); состояние тепловых элементов и др. Полный список контрольных параметров приведен в РУКОВОДСТВЕ ПОЛЬЗОВАТЕЛЯ.
Датчик это элемент, который определяет значения контрольных параметров или величин, являющихся функциями контрольных параметров в определенных точках системы. Датчик в РАТЕГ может использоваться двояким образом:
Датчики могут накапливать временную зависимость выдаваемой величины и интеграл по времени от выдаваемой величины.
В РАТЕГ предусмотрены датчики, определяющие:
- параметры гидравлической сети;
- параметры теплового элемента;
- параметры системы в целом;
- состояние и время изменения состояния элементов системы (клапан открыт/закрыт, насос включен/выключен и др.).
Кроме того, имеется так называемый формульный датчик (преобразователь), который рассчитывает значения логико-числовых выражений. Эти выражения могут включать числа, имена других датчиков, триггеров (см. ниже), функций, знаки операций, круглые скобки. Синтаксис выражения совпадает с синтаксисом ФОРТРАНа. Перечень функции и знаков операций, которые могут использоваться в выражениях, приведен в РУКОВОДСТВЕ ПОЛЬЗОВАТЕЛЯ. Преобразователь позволяет определять одни параметры в виде функций других параметров системы. Например, расход питательной воды в парогенераторе может быть задан в виде функции давления в ПГ, уровня и др.
Триггер это элемент, который может находиться в двух устойчивых состояниях (0 или 1) и по сигналу менять текущее состояние. (По сути, триггер совпадает с элементом trip в RELAP). Сигнал, управляющий триггером, представляет собой логический оператор, операндами которого могут быть: показания датчиков, контрольные параметры, функции показаний датчиков и контрольных параметров, состояния других триггеров, уставки. Операнды сигнала могут быть связаны арифметическими, логическими и др. операциями. Перечень функции и знаков операций, которые могут использоваться в сигналах, приведен в РУКОВОДСТВЕ ПОЛЬЗОВАТЕЛЯ.
Кроме обычного триггера в РАТЕГ04 имеется триггер2 – триггер, управляемый двумя сигналами, то есть переключение на каждое состояние осуществляется по своему сигналу. Такой триггер удобно использовать для управления системами с гистерезисом при прямом и обратном ходе рабочего органа, например, некоторыми типами клапанов.
Регулятор рассчитывает изменение контрольного
параметра f по закону:  , где F – функция
датчиков.
, где F – функция
датчиков.
Пример: Для поддержания расхода насоса G0
можно для угловой скорости насоса использовать следующий регулятор:  .
.
Для каждого управляемого компонента ЯЭУ определяется управляющие им триггеры, датчики и регуляторы.
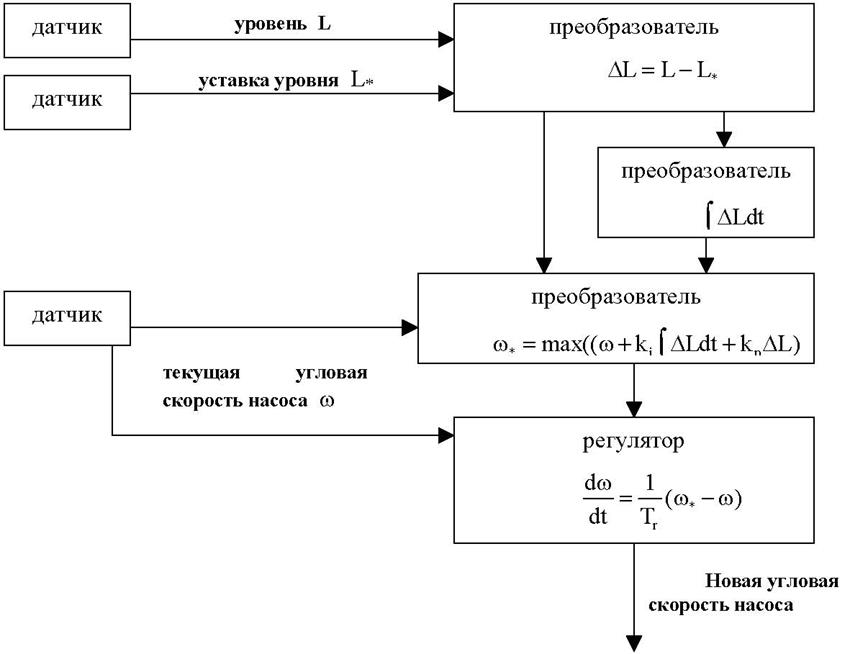
Рис. 2.12 Схема блока регулирования
Система управления и регулирования позволяет реализовывать модели типовых звеньев (пропорциональное, интегральное, апериодическое и др.) и блоков регулирующих систем, а также типовые нелинейности (нечувствительность, ограничения, люфт, релейные элементы) в регулирующих системах [ 26 ]. Апериодическое звено реализуется регулятором, а остальные - с помощью преобразователей и триггеров.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.