На флажке 3, установленном на кривошипе 4, закреплен магнит 2, воздействующий на герконовый выключатель 1 при совмещении.
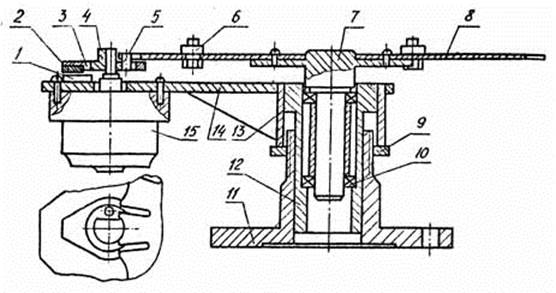
Рисунок 3 - Поворотный делительный стол
Работает загрузочное устройство следующим образом. При подаче питания на электродвигатель начинает вращаться кривошип с цевкой, которая за каждый оборот переводит диск 8 на один шаг. Команда на выключение электродвигателя подается при замыкании геркона под воздействием магнита.
Делительный стол допускает регулировки: установочной поверхности по высоте в пределах 160...170 мм (при помощи гайки 9 и стопорного винта); углового положения несущего диска 8 (поворотом кронштейна 14 с последующей фиксацией винтом); перебега кривошипа 4 после выхода цевки 5 из зацеплений (поворотом флажка 3 с фиксацией винтом).
2.3.3. Блоки кассет (рис. 4) устанавливаются на правый и левый делительные столы. Блок кассет состоит из подкассетника 9, кольцевых кассет 1,2,3,4, установочных пальцев 6,7,8,10 и опор 5. Опоры предназначены для установки блоков кассет друг на друга при хранении и транспортировке в штабелированном виде. Подкассетник и опоры являются унифицированными элементами с постоянными размерами независимо от применяемых кассет. Кассеты 1,2,3,4 и пальцы 6,7,8,10 разрабатывают для конкретных сборочных компонентов.
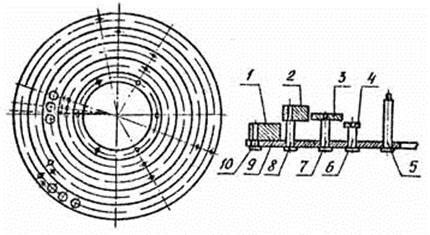
Рисунок 4 - Блок кассет
2.3.4. Захватное устройство (рис. 5) представляет собой механизм с пневматическим приводом, преобразующий поступательное движение штока II во вращательное движение трех губок 5 относительно осей 4. Губки 5 в виде спиц свободно установлены в отверстиях рычагов 7 и предохраняются от выпадения и поворота штифтами на подвеске 8, Поворот рычагов синхронизируется связывающей их металлической лентой 9. Шток поршня соединен при помощи кронштейна 12 и пружинного толкателя 13 с поворотной частью механизма, на одном из блоков которого закреплен рычаг 15. При сжатом ЗУ рычаг 15 воздействует на микровыключатель 14, контролирующий полное сведение губок ЗУ (отсутствие в нем объекта). Усилие захватывания определяется упругостью пружинного толкателя 13. Разжим ЗУ происходит при подаче воздуха в полость цилиндра. Перемещаясь, шток 2 через кронштейн 13 и пружинный толкатель 13 поворачивает блоки с рычагами 7 и губками 5 в направлении от оси центрирования ЗУ. Конструкцией ЗУ предусмотрены регулировка раскрытия рычагов 7 упором-гайкой 10 и настройка положения микровыключателя 14. Устройство очувствления ЗУ служит датчиком проверки комплектности собираемого изделия, правильности положения деталей при сборке и корректировке ошибок. Информация в устройство поступает от датчика перемещений индуктивного типа 1, закрепленного на корпусе 3 ЗУ при помощи кронштейна 2. Сердечник датчика соединен со щупом 6, свободно перемещающимся в осевом направлении и входящим в соприкосновенно с захватываемой деталью.
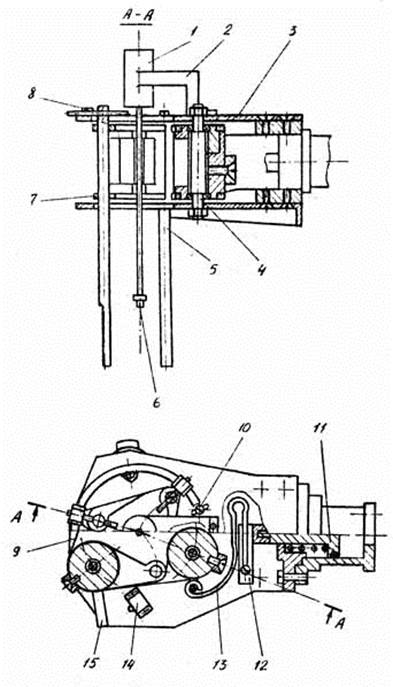
Рисунок 5 - Захватное устройство
2.3.5. Сборочное приспособление (рис. 6) представляет собой пневматическое зажимное устройство. Состоит из основания 4, в теле которого выполнена полость пневмоцилиндра. Два поршня 3 связаны с рычагами 2. На верхней поверхности основания расположен базирующий палец 1. Для закрепления установленной на палец 1 детали в цилиндр подается воздух. Раздвигаясь, поршни 3 поворачивают рычаги 2, концы которых зажимают деталь.
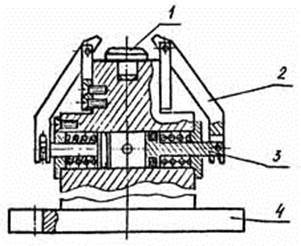
Рисунок 6 - Сборочное приспособление
2.4. Работа РТК
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.