Напряжение питания, В............................................................................220
Давление воздуха, МПа,............................................................................0,6
Габаритные размеры, см............................................................175x123x98
Масса, кг.....................................................................................................200
2.2. Состав РТК и назначение его устройств
В состав РТК, выполненного в виде сборочного центра (рис.1), входят два ПР "Ритм 01.01" 2, два поворотных делительных стола 5, пресс 9, сборочное приспособление 1. "Ритм 01,01" поставляется с системой циклового программного управления АС-2611, которая обладает малым объемом памяти (32 кадра) и не позволяет разветвлять программу управления. Кроме того, программоноситель в виде диодной матрицы затрудняет переналадку. Для совместной работы двух ПР в составе РТК они должны поочередно передавать друг другу управление с помощью технологических команд, что снижает надежность работы РТК. Для устранения указанных недостатков управление РТК осуществляется от адаптивной системы управления на базе микроконтроллера МКП-1 6 и блока связи 7. Составные части РТК расположены на столе 4. Роботы оснащены универсальными очувствленными ЗУ 8. На поворотных делительных столах установлены блоки кассет 3.
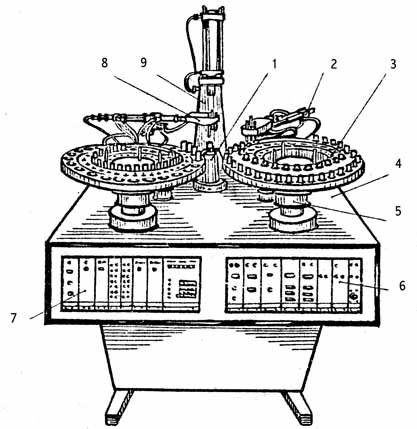
Рисунок 1 - Сборочный РТК
Назначение устройств РТК следующее:
2.2.1. ПР "Ритм 01.01" служит для транспортировании и установки сборочных компонентов на позицию сборки изделия из восьми позиций загрузки.
2.2.2. ЗУ 8 ПР предназначен для захватывания сборочных компонентов по цилиндрической наружной или внутренней поверхности с одновременным центрированием. ЗУ позволяет устанавливать сборочные компоненты в изделие на любую высоту в пределах вертикального перемещения манипулятора.
2.2.3. Делительные столы 5 применяется для пошагового поворота блоков кассет со сборочными компонентами при перехода к новому циклу сборка.
2.2.4. Блоки кассет 3 предназначены для хранения, транспортирования и ориентированного размещения сборочных компонентов на позициях загрузки.
2.2.5. Пресс 9 служит для выполнения прессовых соединений в изделии на сборочной позиции.
2.2.6. Сборочное приспособление 1 предназначено для базирования и закрепления базовой детали в процесса сборка.
2.2.7. Блок связи 7 предназначен идя согласования работы МКП-1 с устройствами комплекса в автоматическом и наладочном режимах и подключения выносного пульта ручного управления.
2.3. Конструкция и принцип работы основных устройств РТК
2.3.1. Пресс (рис. 2) представляет собой пневматический цилиндр диаметром 80 мм с ходом штока 175 мм, установленный вертикально на стойке 6. На конце штока 1 выполнено отверстие диаметром 12Н7 для присоединения сменных наконечников 3.
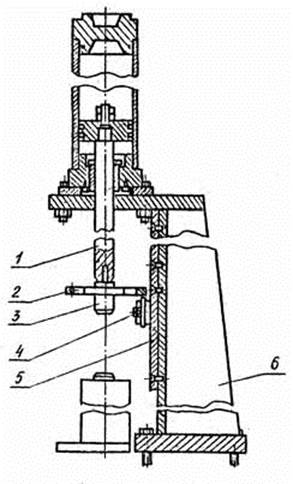
Рисунок 2 - Пресс
Крайние верхнее и нижнее положения штока контролируются при помощи конечных выключателей 4, установленных на планке 5 с возможностью вертикального перемещения.
Конечные выключатели срабатывают от кулачка, закрепленного на хомуте 2. При подаче воздуха в верхнюю полость, шток 1 опускается до срабатывания нижнего конечного выключателя 4. При замыкании выключателя подается сигнал на переключение подачи воздуха из верхней полости в нижнюю. Шток возвращается в исходное верхнее положение. Верхний конечный выключатель дает команду на прекращение подачи воздуха в обе полости цилиндра. Цикл работы пресса завершается.
2.3.2. Делительный стол (рис. 3) представляет собой загрузочное устройство на 48 позиций с постоянным шагом деления. Диск 8, несущий пальцы 6 для установки и базирования блока кассет, выполнен в виде ведомой части мальтийского механизма и закреплен на оси 7, вращающийся в шариковых подшипниках 10. В зацепление с диском входит цевка 5 на кривошипе 4, закрепленном на оси электродвигателя 15 типа РД-09 со встроенным редуктором. Электродвигатель закреплен на поворотном кронштейне 14. Узел из деталей 12, 13, 14 выполнен с возможностью вертикального перемещения относительно основания 2 при вращении гайки 9.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.