4.4.4. Временно преградить рукой
подачу заготовок из лотка вибробункера на приемный стол, имитируя неполадки в
работе загрузочного устройства. Убедиться в остановке ГПМ при отсутствии заготовки
на позиции загрузки. Остановить ГПМ, нажав кнопку ![]() .
.
4.4.5. Установить переключатель
"Выбор типа Загрузочного устройства" в положение ОТКЛ., тумблеры
КОНТРОЛЬ ВАКУУМ 1-4, 5-6-в верхние положение. Включить ГПМ, нажав кнопку ![]() . Прекратить
рукой подачу заготовок из лотка вибробункера на приемный стол, имитируя
потерю заготовки манипулятором при захватывании. Убедитесь в аварийной
остановке ГПМ и загорании индикатора АВАРИИ.
. Прекратить
рукой подачу заготовок из лотка вибробункера на приемный стол, имитируя
потерю заготовки манипулятором при захватывании. Убедитесь в аварийной
остановке ГПМ и загорании индикатора АВАРИИ.
4.4.6. Перевести переключатель "Выбор типа загрузочного устройства" в положение КАСЕТА, тумблер ДВЕ ДЕТ. - в верхнее положение. Заполнить кассету заготовками, положив сверху две - три разъединенные заготовки, и под ними - две склеенные, имитирующие слипание.
4.4.7. Включить ГПМ, нажав кнопку ![]() . Убедиться в
аварийной остановке ГПМ при захвате манипулятором сразу двух заготовок.
Включить ГПМ, нажав последовательно кнопки О (II) и О
(I) на пульте оператора. Выключить компрессор.
. Убедиться в
аварийной остановке ГПМ при захвате манипулятором сразу двух заготовок.
Включить ГПМ, нажав последовательно кнопки О (II) и О
(I) на пульте оператора. Выключить компрессор.
4.5. Оформить отчет. В отчете перечислить аварийные ситуации и виды брака продукции, которые предотвращаются информационной системой ГПМ.
5. КОНТРОЛЬНЫЕ ВОПРОСЫ
5.1. Какое назначение имеет информационная система ГПМ холодной штамповки ?
5.2. Какой состав имеет информационная система ГПМ ?
5.3. Какие типы датчиком предусмотрены в информационной системе ГПМ?
5.4. С какой целью предусмотрена возможность установки в магазинном загрузочном устройстве датчиков двух типов?
5.5. С какой целью ГПМ оснащается двумя датчиками вакуума?
5.6. Как информационная система ГПМ используется для обеспечения техники безопасности?
1. Цель и задачи работы
Цель работы: изучить принцип действия и исследовать вибрационное бункерное загрузочное устройство (вибробункер).
Задачи работы:
- изучить теоретические основы движения детали по лотку вибробункера;
- исследовать влияние различных факторов на движение детали по лотку;
- рассчитать параметры работы вибробункера.
2. Теоретические сведения
Для загрузки заготовками промышленных роботов, работающих в составе технологических комплексов, широко применяют вибробункеры. Вибробункер служит для поштучного разделения заготовок, ориентации их и последующей выдачи в ориентированном положении в питатель.
Наибольшее распространение получили вибрационные загрузочные устройства с круговым бункером и электромагнитным приводом. В данной работе рассматривается вибробункер с двумя раздельными вибраторами, обеспечивающими колебание чаши в вертикальном и тангенциальном направлениях (рис. 1).
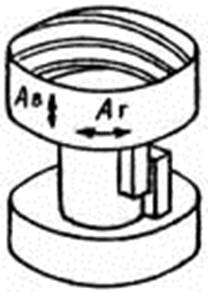
Рисунок 1 - Схема колебаний чаши вибробункера с раздельными вибраторами
Принцип вибрационного перемещения
заключается в следующем [1, 2, 3]. Поверхность лотка B
(рис. 2) наклонена под углом ![]() к горизонту.
На ней лежит деталь А. Под действием гармонических синфазных колебаний лотка в
вертикальном, и горизонтальном (тангенциальном) направлениях с амплитудами
к горизонту.
На ней лежит деталь А. Под действием гармонических синфазных колебаний лотка в
вертикальном, и горизонтальном (тангенциальном) направлениях с амплитудами ![]() и
и ![]() он получает результирующее
колебание под углом
он получает результирующее
колебание под углом ![]() к горизонту.
Крайние положения лотка и детали обозначены пунктирными линиями.
к горизонту.
Крайние положения лотка и детали обозначены пунктирными линиями.
|
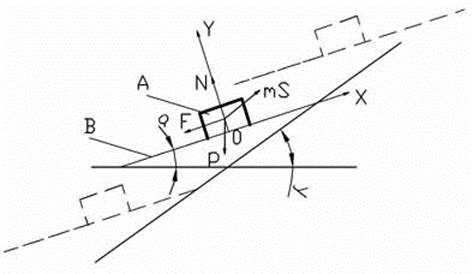
Рисунок 2 - Силы, действующие на деталь, лежащую на колеблющемся лотке
Система координат XOY
привязана к движущемуся лотку. При движении лотка на деталь А действует
система сил: вес ![]() , реакция опоры
, реакция опоры ![]() , сила трения
, сила трения ![]() и сила инерции
и сила инерции ![]() , где
, где ![]() - масса детали;
- масса детали; ![]() - ускорение свободного
падения;
- ускорение свободного
падения; ![]() - ускорение детали.
- ускорение детали.
Уравнения равновесия тела в подвижной системе координат имеют вид
 ; (1)
; (1)
где знак "плюс" соответствует случаю движения лотка с ускорением, направленным направо, а знак "минус" - налево.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.