NotationDigits:=4
-0.48
¦ 1.226-0.7756·x ¦
¦ 2 ¦
¦ -0.4345·x +1.136·x-0.4204 ¦
¦ 3 2 ¦
¦ 0.3305·x -2.616·x +5.335·x-2.618 ¦
¦ 5 4 3 2 ¦
0.2486·x -2.728·x +11.58·x -24.16·x +24.15·x-8.488
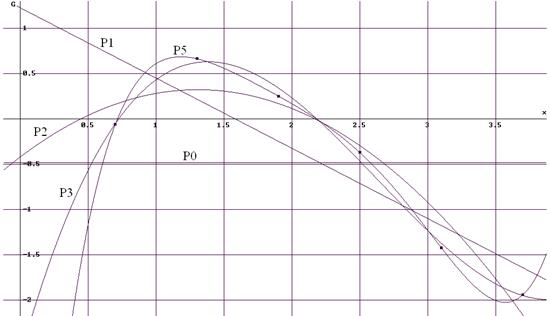
Кривые аппроксимирующих многочленов.
Как видим, многочлен 5-й степени строго проходит через заданные таблицей точки и равен многочлену G(x) из 3-й задачи.
Для аппроксимирующего полинома
третьей степени ![]() получить аналитические
выражения
получить аналитические
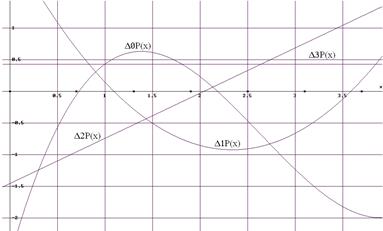
выражения ![]() , n=0,1,2,3,4 и все
конечно-разностные кривые изобразить на одном графике.
, n=0,1,2,3,4 и все
конечно-разностные кривые изобразить на одном графике.
Выразим повторные разности многочлена согласно определению:
3 2
0P(x):=(P(x):=0.3305·x -2.616·x +5.335·x-2.618)
1P(x):=0P(x+h)-0P(x)
2P(x):=1P(x+h)-1P(x)
3P(x):=2P(x+h)-2P(x)
В вектор повторных разностей подставим шаг по табличной функции:
lim [ 0P(x) 1P(x) 2P(x) 3P(x) ]`
h0.6
APPROX(EXPAND( lim [ 0P(x) 1P(x) 2P(x) 3P(x) ]`,Trivial,x),6)
h0.6
3 2
¦ 0.3305·x -2.616·x +5.335·x-2.618 ¦
¦ 2 ¦
¦ 0.5949·x -2.782·x+2.330 ¦
¦ 0.7138·x-1.455 ¦
0.4283
Вывести квадратурную формулу для вычисления определенных интегралов с пределами [-1,1] от подынтегральных функций f(t), принадлежащих классу степенных многочленов степеней {0, 1, 2, 3}.
Использовать значения функции в точках, обеспечивающих получение формул наивысшей алгебраической степени точности.
Параметрами квадратурной формулы, которые необходимо найти, являются коэффициенты при значениях полиномиальной подынтегральной функции и значения ее аргументов, в которых она вычисляется.
где ![]() – параметры
квадратурной формулы,
– параметры
квадратурной формулы,
![]() –
интегрируемая функция, не имеющая особенностей в [a,b].
–
интегрируемая функция, не имеющая особенностей в [a,b].
Для данного задания [a,b]=[-1, 1]. Вид квадратурной формулы с четырьма
параметрами (![]() ), определяющими заданный класс степенных
подынтегральных функций
), определяющими заданный класс степенных
подынтегральных функций ![]() , для которых
квадратурная формула должна быть абсолютно точна, будет таким:
, для которых
квадратурная формула должна быть абсолютно точна, будет таким:
Неизвестные параметры этой формулы находятся из системы уравнений, получаемой путем подстановки вместо подинтегральной функции базисных функций заданного класса.
Определим вектор базисных функций в командной строке:
s:=[x^0,x^1,x^2,x^3]
Определяем значения подинтегральной функции в параметрических точках (x1, ) внутри интервала интегрирования:
fx1(s):=LIM(s,x,x1)
fx2(s):=LIM(s,x,x2)
Уравнение для i-той базисной функции из вектора s будет:
q(i):=INT(si,x,-1,1)=w0·fx1(si)+w1·fx2(si)
Полную систему уравнений для нахождения параметров квадратурной формулы получим подстановкой всех базисных функций:
[VECTOR(q(i),i,1,4)]`
2=w0+w1
¦ 0=w0·x1+w1·x2 ¦
¦ 2 2 2 ¦
¦ -=w0·x1 +w1·x2 ¦
¦ 3 ¦
¦ 3 3 ¦
0=w0·x1 +w1·x2
Решение этой системы выполним так. Из первых двух уравнений найдем выражения для w0 и w1 через x1 и x2. Из двух последних найдем аналогичные выражения. Приравняв выражения одноименных параметров w0 и w1, получим уравнения для нахождения x1 и x2.
w01:=SOLVE(VECTOR(q(i),i,1,2),[w0,w1])
w23:=SOLVE(VECTOR(q(i),i,3,4),[w0,w1])
2·x2 2·x1
¦ w0=- w1=- ¦
x2-x1 x1-x2
2·x2 2·x1
¦ w0=- w1=- ¦
¦ 2 2 ¦
3·x1 ·(x2-x1) 3·x2 ·(x1-x2)
Теперь из полученных решений выделяем значения для w0 и ищем решение относительно x1:
SOLVE((RHS(w01))11=(RHS(w23))11,x1)
3 3
¦x1=-,x1=--,x1=,x1=-¦
3 3
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.