Государственный Университет путей сообщения.
Расчет систем автоматического управления электрическим
подвижным составом.
Методические указания к курсовому и дипломному проектированию.
Санкт-Петербург
2001
1.Общие указания.
2.Принципиальные и функциональные схемы систем автоматического управления.
2.1.Принципиальные раcчетные схемы электрических цепей систем автоматического управления.
2.2.Функциональные схемы систем автоматического управления.
3.Расчёт статических характеристик и динамических параметров систем автоматического управления.
3.1.Расчёт статических характеристик и динамических параметров Объекта управления.
3.2.Расчёт статических характеристик и динамических параметров Исполнительного устройства.
3.3. Расчёт статических характеристик и динамических параметров Элементы обратные связи.
3.4. Расчёт статических характеристик и динамических параметров Регулятора и преобразователя сигналов.
4.Расчёт статических характеристик систем автоматического управления.
4.1.Графоаналитический расчёт статических характеристик систем автоматического управления.
4.2.Расчёт ошибок регулирования и коэффициентов усиления систем автоматического управления.
5.Расчёт частотных и динамических характеристик систем автоматического управления.
5.1.Составление и преобразование структурной схемы системы автоматического управления.
5.2.Расчёт и построение логарифмических частотных характеристик.
5.3.Расчёт динамических характеристик систем автоматического управления.
6.Расчет параметров корректирующих цепей системы автоматического управления.
6.1. Расчет и построение логарифмических частотных характеристик скорректированной системы и корректирующего устройства.
6.2. Расчет параметров корректирующих цепей.
6.3. Расчет логарифмических частотных характеристик и переходных процессов скорректированной системы.
Литература.
1.Общие указания
Цель проектирования - приобретение практических навыков расчёта упрощённых систем автоматического управления (САУ), применяемых на электрическом подвижном составе (ЭПС).
1.1 Основные задачи проектирования
- разработка принципиальной расчётной схемы электрических цепей и функциональной схемы системы автоматического управления;
- расчёт статических, динамических, частотных характеристик основных элементов и системы автоматического управления;
- оценка устойчивости системы автоматического управления и качества процессов регулирования;
- разработка мероприятий по улучшению динамических свойств системы автоматического управления с заданными показателями качества процессов регулирования;
1.2 Содержание задания на проектирование
1.Тип ЭПС, количество, тип и группировка тяговых электродвигателей (ТЭД), передаточное число тяговой передачи.
2.Расчётный режим работы ЭПС (ток ТЭД, скорость движения).
3.Задача автоматического управления и закон регулирования.
4.Уровень и пределы изменения напряжения контактной сети, расчётные параметры.
5.Расчётные параметры источников питания цепей возбуждения тяговых электродвигателей.
6.Расчётные параметры элементов обратных связей.
7.Требуемые показатели качества регулирования: время регулирования и относительное максимальное перерегулирование.
1.3 Содержание проекта
1.Принципиальная расчётная схема электрических цепей и расчётная функциональная схема системы автоматического управления.
2.Расчёт статических характеристик и динамических параметров элементов систем автоматического управления.
3.Расчёт статических характеристик системы автоматического управления.
4.Составление и преобразование структурной схемы системы автоматического управления.
5.Расчёт и построение логарифмических частотных характеристик разомкнутой САУ. Оценка качества процессов регулирования САУ по ЛУХ
6. Расчет переходных процессов выходной переменной при ступенчатых изменениях возмущающих воздействий. Оценка качества регулирования САУ.
7.Расчёт параметров корректирующих устройств и разработка схемных решений для улучшения качества регулирования системы автоматического управления.
8.Расчёт переходных процессов выходной переменной для исходной и скорректированной систем автоматического управления при ступенчатых изменениях задающих и возмущающих воздействий.
В пояснительной записке надо привести все расчёты и обоснования принятых решений, необходимые схемы, графики и диаграммы.
1.4 Перечень обязательных схем и графиков
1.Принципиальная расчётная схема электрических цепей системы автоматического управления (включая корректирующее устройство).
2.Функциональная схема автоматического управления(включая корректирующее устройство).
3.Структурная схема системы автоматического управления - исходная и преобразованная.
4.Логарифмические амплитудно- и фазо-частотные характеристики разомкнутой системы - исходной и скорректированной для граничных значений заданного диапазона изменения скорости движения.
5.Расчётные графики переходных процессов выходной переменной при ступенчатых изменениях возмущающих воздействий в исходной и скорректированной системах автоматического управления для граничных значений заданного диапазона изменения скорости движения.
Графики должны быть начерчены на линованной (миллиметровой) бумаге. Условные обозначения, размеры схем, масштабы графиков должны соответствовать требованиям ЕСКД.
В расчётах надо применять международную систему физических единиц (СИ).
2. Принципиальные и функциональные схемы систем
автоматического управления
2.1.Принципиальные расчётные схемы электрических цепей систем
автоматического управления
 |
рекуперативным торможением (САУРТ) электровозов ВЛ-11м .
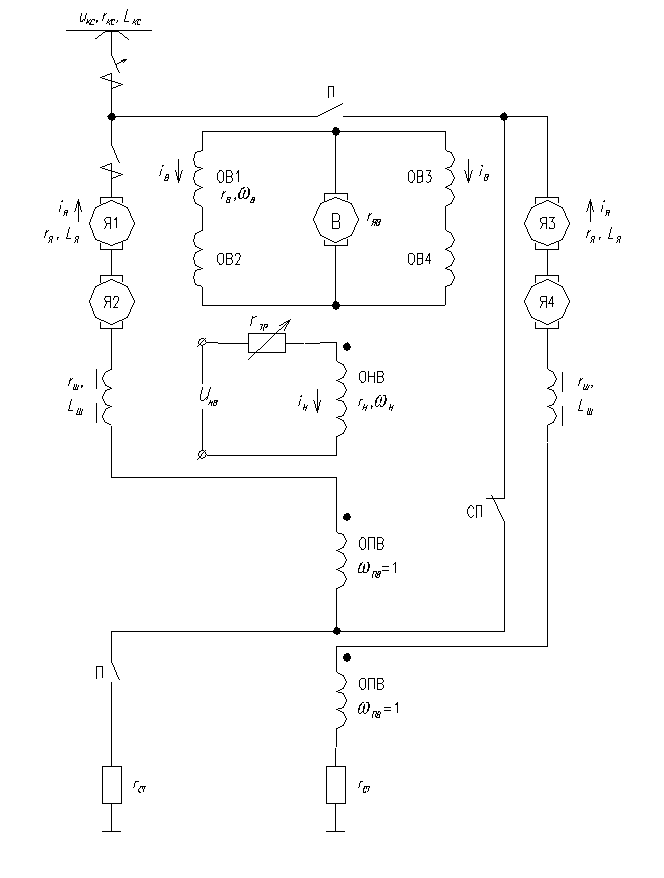
Упрощённая принципиальная схема системы стабилизации
тока рекуперации электровоза ВЛ-10 показана на рис.1.Функционирование этой
схемы рассмотрено в ![]() (§ 28).
(§ 28).
Регулирование величины тока рекуперации производится изменением сопротивления rр регулировочного резистора в цепи обмотки независимого возбуждения (ОНВ) генератора возбуждения В посредством тормозной рукоятки контроллера машиниста.
Обратная связь, обеспечивающая стабилизацию тока рекуперации, осуществляется обмотками противовозбуждения (ОПВ) генератора возбуждения В.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




