Среднее напряжение, подводимое к обмотке независимого возбуждения через транзистор VT4, пропорционально относительной длительности его состояния насыщения и напряжение питания UH:
![]() . (35)
. (35)
Коэффициент усиления преобразователя сигнала регулятора тока рекуперации, 1/В :
 .
(36)
.
(36)
Непрерывность
тока возбуждения iн
обеспечивается буферным диодом VD5. Резистор Rрограничивает
максимальную величину тока возбуждения Iн генератора. При токе возбуждения тяговых
электродвигателей Iв=550 А и максимальном коэффициенте заполнения ![]() коэффициент преобразования цепи ОВН:
коэффициент преобразования цепи ОВН:
 . (37)
. (37)
Передаточная функция регулятора определяется законом регулирования [3].
П-регулятор
является безынерционным, преобразование сигнала обратной связи определяется
линейным уравнением  , его передаточная функция
Wрег(р)=Крег.
, его передаточная функция
Wрег(р)=Крег.
Преобразование сигнала обратной связи ПИ- регулятором в сигнал управления Uy определяется уравнением:
Передаточная функция ПИ-регулятора содержит интегрирующее и форсирующее звенья с постоянной времени Тир:
 . (38)
. (38)
Преобразование сигнала обратной связи ПД- регулятором в сигнал управления Uy определяется дифференциальным уравнением :
 .
.
Передаточная функция ПД-регулятора содержит форсирующее звено с постоянной времени Тдр и апериодическое звено 1-го порядка с постоянной времени Тар, причём Тар<<Тдр :
![]() . (39)
. (39)
Расчет коэффициентов усиления Kрег и постоянных времени регуляторов Tпр, Tдр, Tар и производится на основании динамических параметров САУ (см. разд. 5.1,5.2).
4.Расчёт статических характеристик системы
автоматического управления
Целью расчёта статических характеристик является:
1.Определение уровней и диапазонов изменения выходной переменной Iя, регулирующего воздействия Iв, задающего воздействия Uзу или Iн в интервале изменения скорости движения от v1 до v2.
2.Расчёт коэффициентов преобразования и постоянных времени элементов системы автоматического управления для заданных величин скорости движения v1 и v2.
3.Расчёт
статических ошибок регулирования систем автоматического управления с
пропорциональным и пропорционально-дифференциальными законами регулирования,
обусловленных изменениями скорости движения на величину ![]() и
напряжения контактной сети на величину
и
напряжения контактной сети на величину ![]() .
.
 .
.
4.1.Графоаналитический расчёт статических характеристик
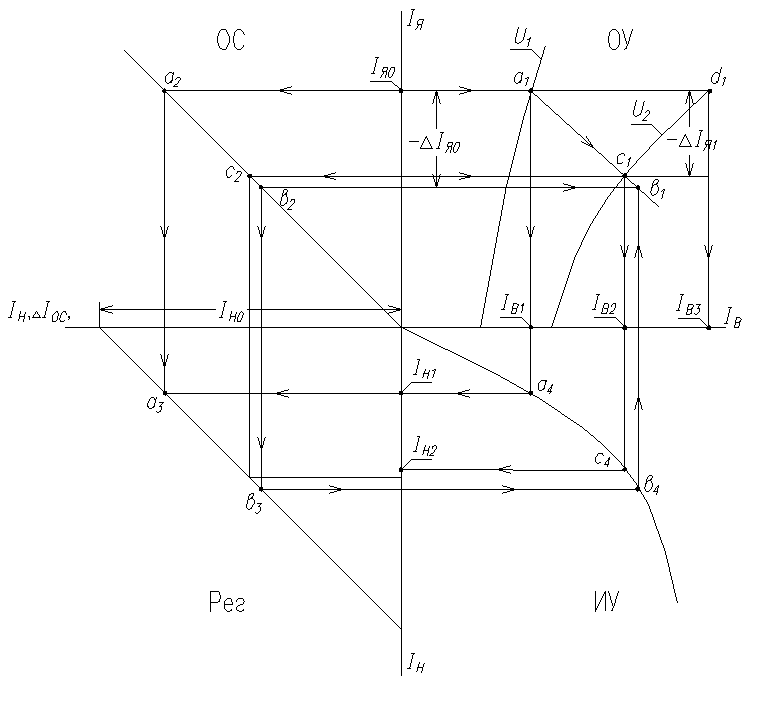 |
рис. 10
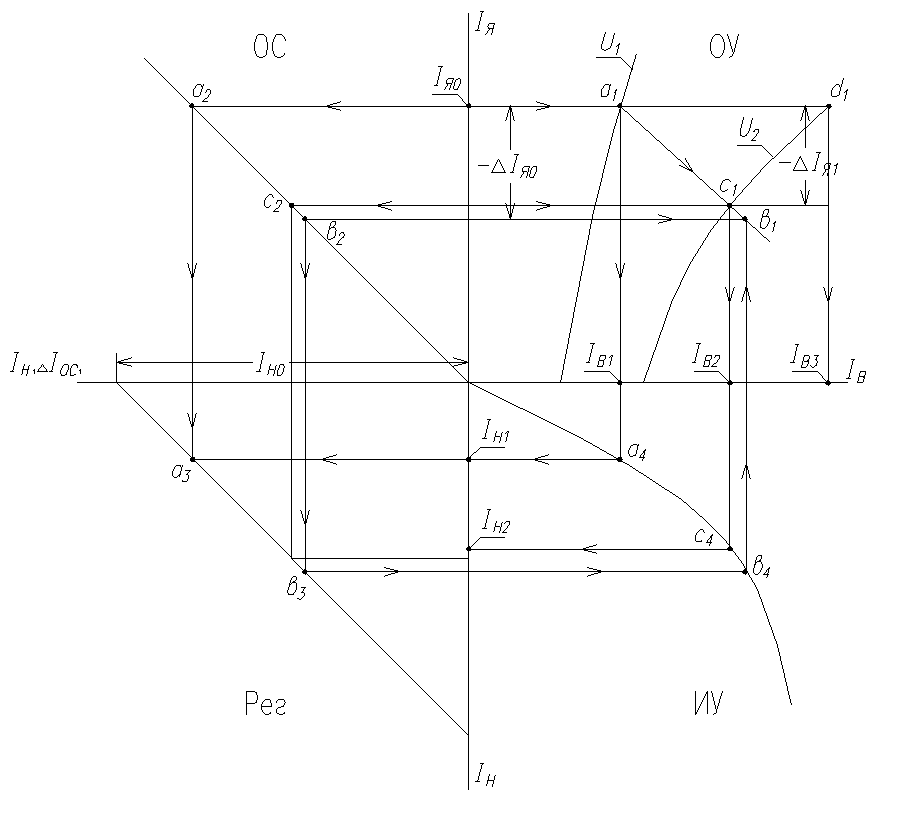 |
Для расчёта характеристик графоаналитичесим методом надо построить статические характеристики элементов системы автоматического управления в четырёх квадрантах системы координат (формат А4) [3].
Статические характеристики системы электрического рекуперативного торможения электровозов ВЛ-10,ВЛ-11М показаны на рис. 10.
Статические характеристики объекта управления Iя(Iв) для скорости движения v1 и v2 надо расположить в первом квадранте, характеристику исполнительного устройства Iв(Iн)- в IV квадранте, характеристику обратной связи DIос(Iя) или Uдт(Iя) - во II квадранте, характеристику регулятора- преобразователя - в III квадранте.
Для
системы рекуперативного торможения электровоза ВЛ-10 требуется определить
ошибку регулирования ![]() , обусловленную изменением скорости движения, при
условии, что характеристики всех элементов системы определены.
, обусловленную изменением скорости движения, при
условии, что характеристики всех элементов системы определены.
Построение характеристики замкнутой системы производят относительно заданного уровня тока якорей Iя0(рис.10а.).
Этот уровень устанавливается в начале торможения при скорости v1 машинистом электровоза посредством тормозной рукоятки контроллера.
Последовательность построения на графике задана направлением стрелок. Вначале надо провести горизонтальную прямую в первом - втором квадрантах на уровне Iя0 до пересечения с характеристиками объекта регулирования для скорости v1 (точка а1) и обратной связи (точка а2).
Из
точки а1 надо провести вертикальную прямую в четвертый квадрант до
пересечения с характеристикой исполнительного устройства Iв(Iн) (точка а4). Из
точки а4 надо провести горизонтальную прямую в третий квадрант. Из
точки а2 надо также провести вертикальную прямую в третий квадрант
до пересечения с горизонтальной прямой (точка а3), проведённой из
точки а4. Через полученную таким построением точку а3
надо провести прямую под углом ![]() .
.
Как
было отмечено в п.разд.3.4 в системе рекуперации электровоза ВЛ-10 применяется
непосредственное регулирование с коэффициентом усиления регулятора Крег = 1.
Поэтому прямая, проведённая через точку а3 под углом ![]() представляет
собой характеристику регулятора.
представляет
собой характеристику регулятора.
Отрицательный наклон характеристики обусловлен необходимостью обеспечения отрицательной обратной связи.
Точка пересечения характеристики регулятора с горизонтальной осью определяет заданную величину тока возбуждения Iно генератора возбуждения В, устанавливаемую машинистом посредством задающего устройства- тормозной рукояткой.
Для
построения характеристики объекта регулирования замкнутой системы Iя(Iв) надо задать
предварительно ошибку регулирования тока ![]() А и провести горизонтальную линию в первом и втором
квадрантах на уровне (Iя0 -
А и провести горизонтальную линию в первом и втором
квадрантах на уровне (Iя0 - ![]() Iя) до пересечения во втором
квадранте с характеристикой обратной связи (точка в2).
Iя) до пересечения во втором
квадранте с характеристикой обратной связи (точка в2).
Из
точки в2 надо провести вертикальную прямую в третий квадрант до
пересечения с характеристикой регулятора (точка в3). Из точки в3
провести горизонтальную прямую в четвертый квадрант до пересечения с характеристикой
исполнительного устройства (точка в4). Из точки в4 провести
вертикальную прямую вверх до пересечения в первом квадранте с горизонтальной
прямой, проведённой на уровне (Iя0 - ![]() Iя) (точка в1).
Iя) (точка в1).
Наклонная прямая, проведённая через точки (а1; в1), является характеристикой Iя(Iв) объекта регулирования замкнутой системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.