, (20)
 (21)
(21)
Для определения передаточных функций надо выразить уравнения (19)-(21) в операторной форме и преобразовать относительно входных переменных соответствующих цепей:
![]() (22)
(22)
![]() (23)
(23)
|
(24)
В уравнениях (22)-(24) приняты следующие обозначения коэффициентов :
|
; (25)
 ; (26)
; (26)
 ;
(27)
;
(27)
 ; (28)
; (28)
 . (29)
. (29)
Дифференцирующие звенья Кwp и Кwнp в уравнениях (22),(23) характеризуют отрицательные обратные связи, обусловленные проявлением э.д.с. самоиндукции обмоток возбуждения тяговых электродвигателей и генератора возбуждения . Передача воздействия переменной величины изменения намагничивающих сил на магнитный поток генератора возбуждения характеризуется апериодическим звеном 1-го порядка с постоянной времени Твхв.
Если подставить уравнение (24) в (22) и приравнять нулю изображение производных магнитных потоков будет получено аналитическое выражение статической характеристики генератора возбуждения:
![]()
Коэффициент усиления исполнительного устройства равен коэффициенту наклона линеаризующего отрезка характеристики Iв(Iн) (см. рис. 6а).:
 .
(30)
.
(30)
3.3. Расчёт статических характеристик и динамических
параметров элементов обратной связи.
В
системе электрического рекуперативного торможения электровоза ВЛ-10 обратная
связь создаётся ампер-витками ![]() противовозбуждения
генератора возбуждения (см. рис.1). Обратная связь отрицательная, безынерционная
характеризуется отношением числа витков обмоток противовозбуждения ОПВ и
независимого возбуждения ОНВ генератора возбуждения:
противовозбуждения
генератора возбуждения (см. рис.1). Обратная связь отрицательная, безынерционная
характеризуется отношением числа витков обмоток противовозбуждения ОПВ и
независимого возбуждения ОНВ генератора возбуждения:
 .
(31)
.
(31)
Сигнал
обратной связи, приведенный к числу витков wн обмотки ОНВ определяется соотношением: 
Сигналы
обратных связей по току якорей тяговых электродвигателей в системах
автоматического управления электрическим торможением электровоза ВЛ-11м
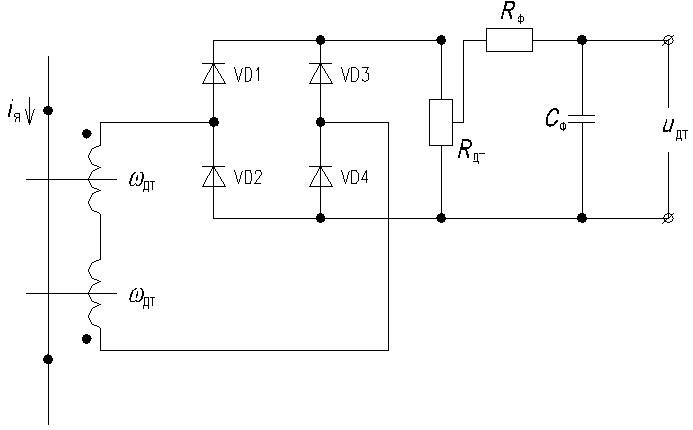
создаются датчиками тока ДТЯ на основе трансформаторов постоянного тока (ТПТ) ![]() .
.
В выходной цепи датчика тока устанавливают фильтр, сглаживающий пульсации выходного напряжения и регулировочный потенциометр Rп (рис.7). Выходной фильтр придаёт датчику тока свойства апериодического звена 1-го порядка. Поэтому зависимость выходного напряжения датчика от тока цепи якорей определяется дифференциальным уравнением:
 ,
(33)
,
(33)
где:
rдт - сопротивление резистора выходной цепи датчика;
wдт - число витков обмоток датчика;
Тдт - постоянная времени выходного фильтра датчика;
 |
Операторное
уравнение, выраженное в отклонениях переменных ![]() и
и ![]() и характеризующее передаточную функцию датчика тока имеет
вид:
и характеризующее передаточную функцию датчика тока имеет
вид:
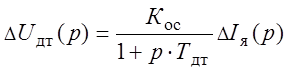 . (33)
. (33)
Коэффициент
преобразования тока якорей тяговых электродвигателей в выходное напряжение
датчика 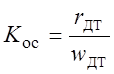 является коэффициентом отрицательной обратной связи системы
автоматического уравления. В расчётах характеристик датчиков тока можно принять
Кос=0,02-0,04 Ом. Регулировочный резистор Rдт позволяет регулировать коэффициент обратной связи при
настройке САУРТ. При выполнении курсового проекта надо по заданной в исходных
данных постоянной времени датчика тока Tдт =Rф
Cф выбрать параметры сглаживающего фильтра:
сопротивление резистора Rф и
емкость конденсатора Сф.
является коэффициентом отрицательной обратной связи системы
автоматического уравления. В расчётах характеристик датчиков тока можно принять
Кос=0,02-0,04 Ом. Регулировочный резистор Rдт позволяет регулировать коэффициент обратной связи при
настройке САУРТ. При выполнении курсового проекта надо по заданной в исходных
данных постоянной времени датчика тока Tдт =Rф
Cф выбрать параметры сглаживающего фильтра:
сопротивление резистора Rф и
емкость конденсатора Сф.
3.4. Расчёт статических характеристик и динамических параметров
регулятора и преобразователя сигналов.
В системе электрического рекуперативного торможения электровозов ВЛ-10 применено непосредственное регулирование магнитного потока генератора возбуждения В. Коэффициент обратной связи Кос - является коэффициентом приведения тока якорей тяговых электродвигателей к току независимого возбуждения генератора возбуждения. Поэтому характеристика регулятора определяется коэффициентом усиления Крег=1.
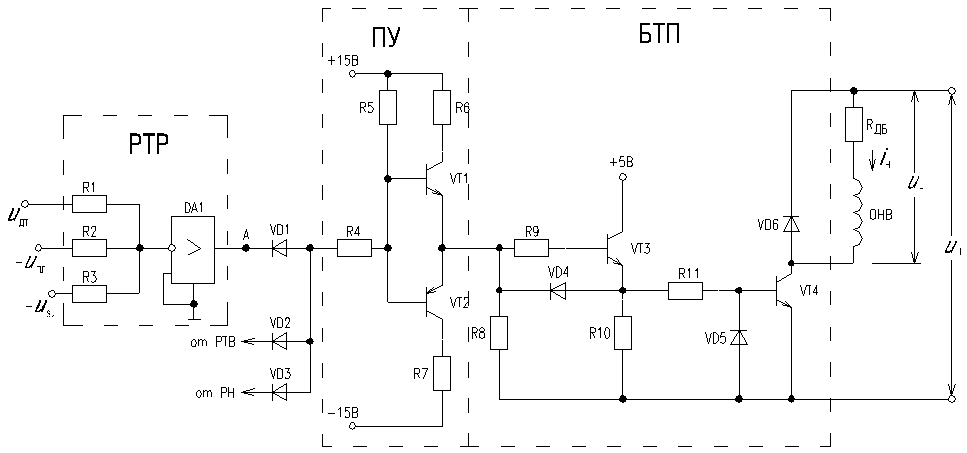
Принципиальная схема канала регулирования тока рекуперации
САУРТ электровозов ВЛ-11м, состоящего из регулятора тока рекуперации РТР, промежуточного усилителя ПУ и блока транзисторного прерывателя БТП, показана на рис.8.
Регулятор тока рекуперации представляет собой операционный усилитель DA1, работающий в режиме инвертирующего компаратора. На инвертирующий вход усилителя поданы напряжение датчика тока якорей Uдт, напряжение задающего устройства (-Uзу) и напряжение (-Uпл) генератора пилообразного напряжения. Регулятор тока выполняет две функции:
- производит вычитание напряжений, формируя сигнал рассогласования по току якорей DUу (Uдт - Uзу);
- преобразует посредством сравнения сигнала рассогласования DUу с пилообразным напряжением Uпл непрерывный сигнал обратной связи Uдт в периодическую последовательность импульсных сигналов (см. рис.9).
Относительная длительность положительных выходных импульсов компаратора зависит от отношения сигнала управления Uу к амплитуде пилообразного напряжения Uпл:
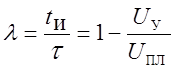 . (34)
. (34)
На интервале положительного импульса выходного напряжения компаратора DA1 происходит переключение транзистора VT1 промежуточного усилителя, управляющего транзистора VT3 и силового транзистора VT4 блока транзисторного прерывателя в состояние насыщения (высокой проводимости).
 |
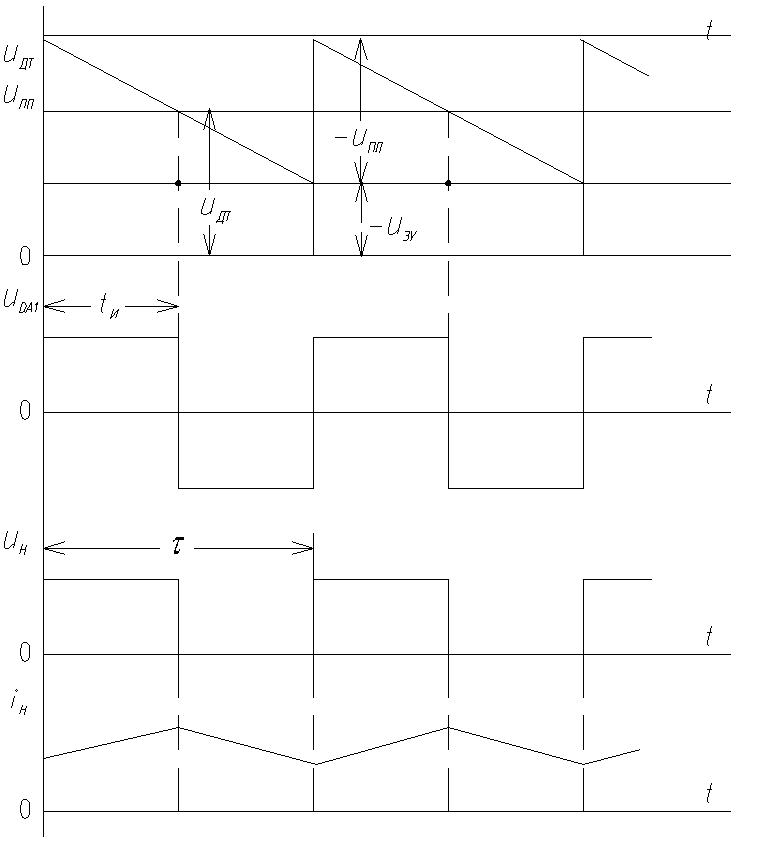 |
рис .9
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.