После графического суммирования ЛЧХ звеньев
и построения ЛЧХ разомкнутой системы надо указать на графиках запас
устойчивости по фазе ![]() , по амплитуде
, по амплитуде ![]() и определить из графика частоту при
которой ЛАЧХ системы пересекает ось абсцисс (частоту среза
и определить из графика частоту при
которой ЛАЧХ системы пересекает ось абсцисс (частоту среза ![]() ) (см.рис.13).
) (см.рис.13).
В
том случае, если расчётный запас устойчивости для скорости v1 отличается от ![]() надо
выполнить дополнительное построение ЛАЧХ, изменив ординату G1(0) =
надо
выполнить дополнительное построение ЛАЧХ, изменив ординату G1(0) = ![]() так, чтобы запас устойчивости по фазе составил
так, чтобы запас устойчивости по фазе составил ![]() .
Общий коэффициент усиления системы в этом случае надо рассчитать по результатам
построения ЛЧХ:
.
Общий коэффициент усиления системы в этом случае надо рассчитать по результатам
построения ЛЧХ:
 .
.
Полученные
из построения запасы устойчивости, а также величину частоты ![]() ЛАЧХ
надо записать в табл.9.
ЛАЧХ
надо записать в табл.9.
Таблица 9
Запасы устойчивости и показатели качества
системы автоматического управления
|
Параметр |
v1= , км/ч |
v2= , км/ч |
|
|
||
|
|
||
|
|
||
|
|
||
|
tр, с |
||
|
|
||
|
t1, с |
||
|
|
||
|
|
В
пояснительной записке надо указать какими техническими решениями обеспечивается
уменьшения общего коэффициента усиления К0 для
скорости движения v1.
Выполнить расчёт общего коэффициента усиления К02 для
скорости v2 по
формуле (47) с учётом регулировки коэффициента К01 для скорости движения v1. После этого надо на отдельном графике построить ЛЧХ
разомкнутой системы для скорости движения v2, определить запасы устойчивости ![]() и
и ![]() ,
частоту среза
,
частоту среза ![]() и записать их величины в табл.9.
и записать их величины в табл.9.
На
основании полученных величин запасов устойчивости и частоты среза надо
выполнить оценку основных показателей качества регулирования- степени
колебательности ![]() и времени регулирования tр. Результаты оценки надо записать в табл.9.
и времени регулирования tр. Результаты оценки надо записать в табл.9.
5.3 Расчёт динамических характеристик
систем автоматического управления
Цель расчёта - определение максимальных величин тока рекуперации, длительности действия максимального броска тока (продолжительность первого максимума) и длительности переходного процесса в цепи якорей тяговых электродвигателей.
Возмущающее
воздействие - ступенчатое изменение напряжения ![]() контактной сети передаётся выходной переменной
контактной сети передаётся выходной переменной ![]() через
апериодическое звено цепи якорей:
через
апериодическое звено цепи якорей:
 .
.
Регулирующее
воздействие обратной связи запаздывает во времени, поэтому первоначально
отклонение тока якорей ![]() нарастает по экспоненциальному закону, стремясь к
установившемуся уровню
нарастает по экспоненциальному закону, стремясь к
установившемуся уровню ![]() (рис. 14).
(рис. 14).
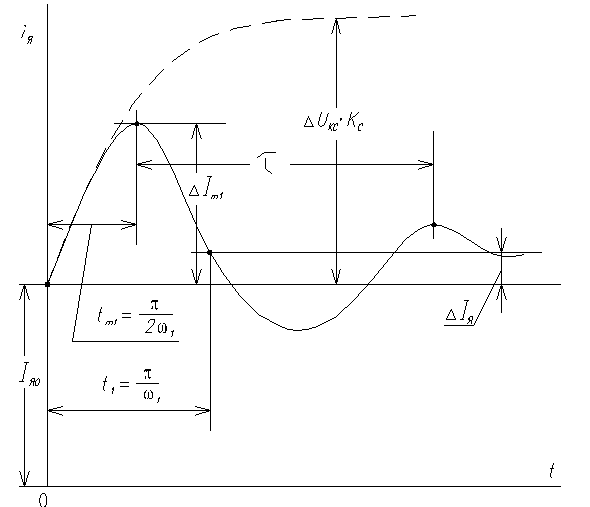 |
Аналитическими
исследованиями установлено, что регулирующее воздействие обратной связи
начинает проявляться через четверть периода ![]() колебаний
замкнутого контура, затухающих с частотой
колебаний
замкнутого контура, затухающих с частотой ![]() [7]. На основании этого максимум перерегулирования
тока якорей
[7]. На основании этого максимум перерегулирования
тока якорей ![]() ТЭД при ступенчатом изменении напряжения
ТЭД при ступенчатом изменении напряжения ![]() контактной
сети можно оценить по приближённой формуле, А :
контактной
сети можно оценить по приближённой формуле, А :
 . (48)
. (48)
Для
расчёта угловой частоты ![]() затухающих колебаний замкнутого контура системы
автоматического управления надо составить передаточную функцию замкнутой
системы по возмущающему воздействию
затухающих колебаний замкнутого контура системы
автоматического управления надо составить передаточную функцию замкнутой
системы по возмущающему воздействию![]() .
.
Для системы стабилизации тормозного тока электровоза ВЛ 10

Приравняв
нулю знаменатель передаточной функции и вычислив корни кубического уравнения
надо рассчитать по комплексным сопряжённым корням ![]() угловую
частоту затухающих колебаний, 1/с :
угловую
частоту затухающих колебаний, 1/с :
 . (49)
. (49)
По угловой частоте wз надо
вычислить максимум перерегулирования ![]() для скорости движения v1 (рис. 14), продолжительность первого максимума
для скорости движения v1 (рис. 14), продолжительность первого максимума  ,
период затухающих колебаний продолжительность первого максимума
,
период затухающих колебаний продолжительность первого максимума  . Результаты
расчётов надо записать в табл.9.
. Результаты
расчётов надо записать в табл.9.
Расчёт
переходного процесса тока якорей iя(t) тяговых электродвигателей при ступенчатом изменении
напряжения ![]() контактной сети надо выполнить на компьютерной модели. Подготовка
расчётных параметров и методика расчёта рассмотрены в учебном пособии [8].
контактной сети надо выполнить на компьютерной модели. Подготовка
расчётных параметров и методика расчёта рассмотрены в учебном пособии [8].
В
пояснительной записке надо привести структурную схему компьютерной модели,
расчётные параметры звеньев, компьютерную распечатку вывода табличных данных
изменения выходной переменной и графики зависимости iя(t) при ступенчатом изменении напряжения ![]() контактной
сети для скорости движения v1 и v2. На графиках надо указать
максимальное значение тока якорей Iя max, ошибку регулирования в установившемся режиме
контактной
сети для скорости движения v1 и v2. На графиках надо указать
максимальное значение тока якорей Iя max, ошибку регулирования в установившемся режиме ![]() ,
продолжительность первого максимума тока t1, длительность процесса регулирования tр. Полученные результаты
надо сопоставить с аналитическими расчётами, сделать вывод о соответствии
расчётов и о влиянии величин скорости движения на динамические характеристики
системы автоматического управления рекуперативным торможением.
,
продолжительность первого максимума тока t1, длительность процесса регулирования tр. Полученные результаты
надо сопоставить с аналитическими расчётами, сделать вывод о соответствии
расчётов и о влиянии величин скорости движения на динамические характеристики
системы автоматического управления рекуперативным торможением.
ЛИТЕРАТУРА
1.Тихменев Б.Н., Трахтман Л.М. Подвижной состав электрифицированных железных дорог. М., Транспорт, 1980. с. 172-177.
2.Антипов В.А. и др. Система управления рекуперативным торможением модернизированна. М., "Локомотив", 1997 №7, с. 20-24.
3.Якушев А.Я. Автоматическое управление электрическим подвижным составом. ч.1. С-Пб., ПГУПС 1997, 85 с.
4. Якушев А.Я. Автоматическое управление электрическим подвижным составом. ч.2. С-Пб., ПГУПС 2001, 86 с.
5.Якушев А.Я. Плакс А.В. Датчик тока на основе трансформатора постоянного тока Л. ЛИИЖТ 1982; 16 с.
6.Якушев А.Я. Проектирование систем автоматического управления ЭПС. ч.2. Л. ЛИИЖТ. 1987, 35 с.
7.Якушев А.Я. Иващенко В.О. Евтушенко М.А. Исследование САР ЭПС на математической модели. ч.1. С-Пб., ПГУПС, 1998, 60 с.
8.Якушев А.Я. Иващенко В.О. Исследование САР ЭПС на математической модели. ч.2. С-Пб., ПГУПС, 2000, 40 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.