Ошибка
регулирования замкнутой системы ![]() Iяv, обусловленная изменением скорости движения
Iяv, обусловленная изменением скорости движения ![]() , определяется разностью ординат
точек (а1; с1) пересечения характеристики объекта управления замкнутой
системы с характеристиками объекта управления разомкнутой системы для скорости
движения v1 и v2.
, определяется разностью ординат
точек (а1; с1) пересечения характеристики объекта управления замкнутой
системы с характеристиками объекта управления разомкнутой системы для скорости
движения v1 и v2.
Для
системы автоматического управления режимами рекуперативного торможения
электровоза ВЛ-11м требуется
определить по заданной ошибке регулирования ![]() Iяv величину коэффициента усиления регулятора Крег.
Iяv величину коэффициента усиления регулятора Крег.
Построение характеристики произведено также относительно заданного тока якорей Iя0 (см. рис.10б).Для построения характеристик надо провести горизонтальную прямую на уровне Iя0 до пересечения в первом квадранте с характеристикой объекта управления для скорости v1 (точка а1) и во втором квадранте - с характеристикой элемента обратной связи (точка 2).
Вторую
горизонтальную прямую надо провести ниже на величину заданной ошибки
регулирования ![]() Iяv до пересечения с характеристикой объекта управления для скорости v2 (точка с1). Из
точек а1, с1 надо провести вертикальные прямые вниз до
пересечения с характеристикой исполнительного устройства (точки а4;
с4) и далее горизонтальные прямые в третий квадрант. Из второго
квадранта через точки а2, с2 надо провести вертикальные
прямые в третий квадрант до пересечения с горизонтальными прямыми, проведёнными
через точки а4, с4. Наклонная прямая, проведённая через
полученные точки пересечения а3, с3 представляет собой
характеристику регулятора. Коэффициент наклона характеристики является произведением
коэффициентов преобразования регулятора и преобразователя сигнала:
Iяv до пересечения с характеристикой объекта управления для скорости v2 (точка с1). Из
точек а1, с1 надо провести вертикальные прямые вниз до
пересечения с характеристикой исполнительного устройства (точки а4;
с4) и далее горизонтальные прямые в третий квадрант. Из второго
квадранта через точки а2, с2 надо провести вертикальные
прямые в третий квадрант до пересечения с горизонтальными прямыми, проведёнными
через точки а4, с4. Наклонная прямая, проведённая через
полученные точки пересечения а3, с3 представляет собой
характеристику регулятора. Коэффициент наклона характеристики является произведением
коэффициентов преобразования регулятора и преобразователя сигнала:
 .
(40)
.
(40)
В
системе автоматического управления с пропорционально-интегральным законом
регулирования ошибка регулирования тока якоря ![]() Iя=0. Статическая
характеристика объекта регулирования замкнутой системы представляет собой
горизонтальную прямую на уровне Iя0. Точки пересечения
а1 и d1 (рис.11)
этой прямой с характеристиками Iя(Iв) для
скорости v1 и v2 определят расчётные
величины токов возбуждения Iв1, Iв3 тяговых
электродвигателей.
Iя=0. Статическая
характеристика объекта регулирования замкнутой системы представляет собой
горизонтальную прямую на уровне Iя0. Точки пересечения
а1 и d1 (рис.11)
этой прямой с характеристиками Iя(Iв) для
скорости v1 и v2 определят расчётные
величины токов возбуждения Iв1, Iв3 тяговых
электродвигателей.
4.2.Расчёт коэффициентов усиления и ошибок регулирования
замкнутой системы
Для расчёта ошибок регулирования замкнутой системы с пропорциональным и пропорционально-дифференциальным законами регулирования надо вычислить коэффициенты преобразования всех элементов системы по формулам (5),(8)-(12), (15), (25)-(30),(36),(37),(40) для заданного значения тока якорей Iя0 и скорости движения v1. Результаты расчёта привести в табл.6. Таблица 6
Коэффициенты преобразования функциональных элементов
|
v, км/ч |
v1 |
v2 |
|
|
Iя, А |
Iя1 |
Iя2 |
|
|
Iв, А |
|||
|
Iн, А |
|||
|
Кя, (км/ч)/Ом |
|||
|
Кф,Ом/(км/ч) |
|||
|
Кn , |
|||
|
Кфв, |
|||
|
Коу, |
|||
|
Киу |
|||
|
Кос |
|||
|
Крег |
|||
|
Кv ,А/(км/ч) |
|||
|
К0 |
Ошибка
регулирования тока ![]() Iяv замкнутой системы, обусловленная изменением скорости
движения от v1 до v2 согласно функциональным
схемам рис.3 определяется следующей формулой, А :
Iяv замкнутой системы, обусловленная изменением скорости
движения от v1 до v2 согласно функциональным
схемам рис.3 определяется следующей формулой, А :
 .
(41)
.
(41)
В формуле (41) коэффициентом К0 обозначен общий коэффициент усиления:
![]() .
(42)
.
(42)
После
расчёта ошибки регулирования ![]() Iяv, обусловленной изменением скорости, надо повторить
расчёт всех коэффициентов преобразования элементов системы автоматического
управления для тока рекуперации Iя2=Iя1-
Iяv, обусловленной изменением скорости, надо повторить
расчёт всех коэффициентов преобразования элементов системы автоматического
управления для тока рекуперации Iя2=Iя1-![]() Iяv при скорости движения v2. Результаты расчёта привести в табл.6.
Iяv при скорости движения v2. Результаты расчёта привести в табл.6.
Ошибки
регулирования замкнутой системы ![]() IяU, обусловленная изменением напряжения контактной сети
IяU, обусловленная изменением напряжения контактной сети ![]() Uкс определяется следующей формулой, А :
Uкс определяется следующей формулой, А :
 .
(43)
.
(43)
При
пропорционально-интегральном законе регулирования ошибки регулирования тока
рекуперации, обусловленные изменением скорости движения ![]() v и напряжением контактной
сети равны нулю. Поэтому расчёт коэффициентов преобразования объекта управления исполнительного
устройства системы автоматического управления
надо выполнить для скорости v1, v2 заданной величины тока
якорей тяговых электродвигателей Iя0 и определенных расчетом величин тока возбуждения IB1, I
B3.
v и напряжением контактной
сети равны нулю. Поэтому расчёт коэффициентов преобразования объекта управления исполнительного
устройства системы автоматического управления
надо выполнить для скорости v1, v2 заданной величины тока
якорей тяговых электродвигателей Iя0 и определенных расчетом величин тока возбуждения IB1, I
B3.
5.Расчёт частотныхи динамических характеристик
системы автоматического управления
5.1.Составление и преобразование структурной схемы системы
автоматического управления
Составление структурной схемы системы автоматического управления выполняют на основе операторных уравнений (6), (7), (22)-(24), (33), (38), (39), содержащих передаточные функции звеньев направленного действия функциональных элементов системы [3].
Структурные схемы систем автоматического управления рекуперативным торможением электровозов ВЛ-10, ВЛ-11м показаны на рис.11.
Исходная структурная схема содержит звенья, включенные встречно-параллельно, образующие местные обратные связи. Такие звенья надо привести к эквивалентным звеньям с табличными передаточными функциями.
Апериодическое звено 1-го порядка магнитопровода и дифференцирующее звено цепи возбуждения тягового электродвигателя можно привести к эквивалентному апериодическому звену 1-го порядка с передаточной функцией:
 .
.
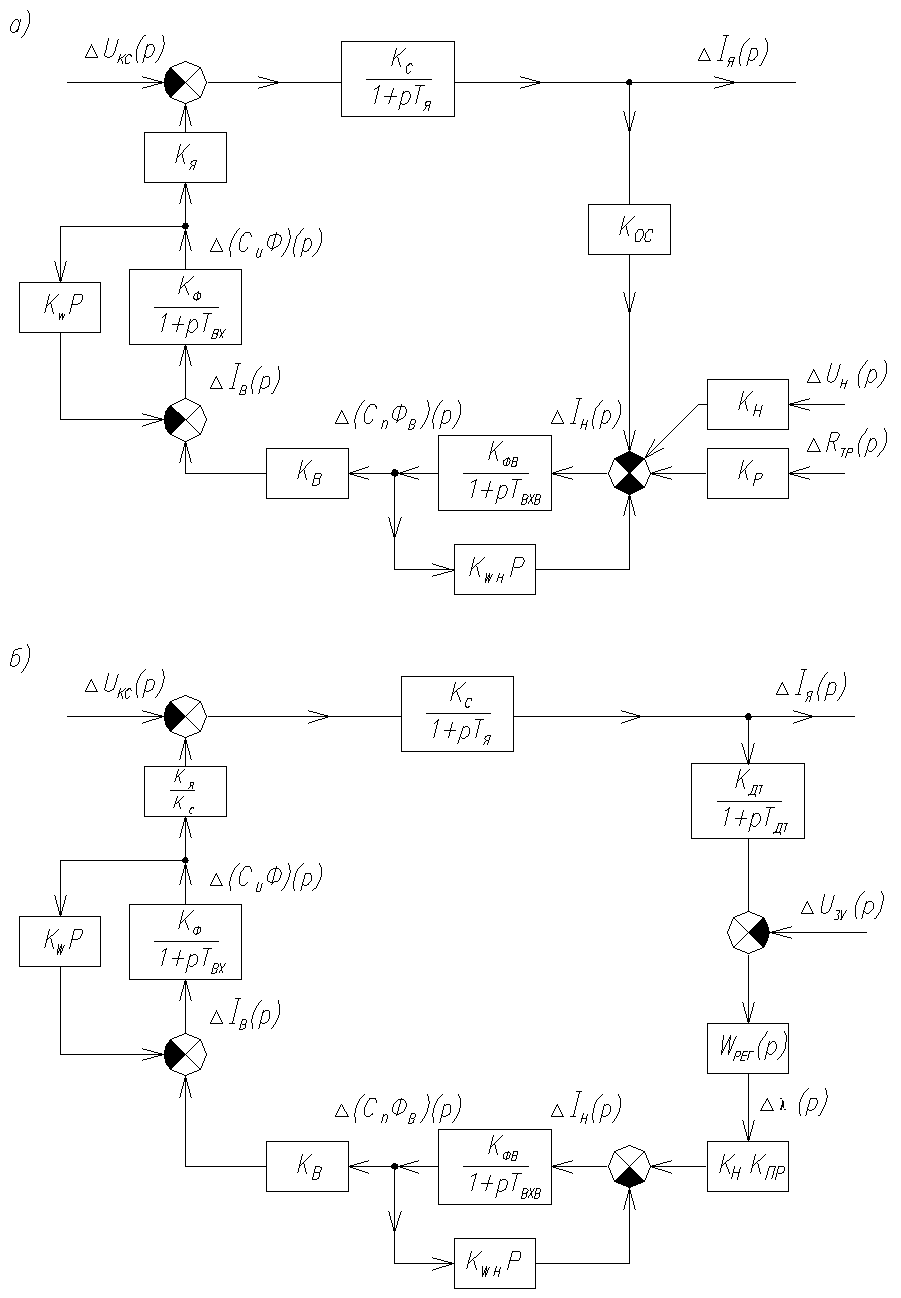 |
Рис.11
Постоянная времени приведённого апериодического звена, С :
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

