Петербургский Государственный Университет
Путей Сообщения
Кафедра: «Электрическая тяга»
Курсовая работа на тему:
«Расчёт устойчивости и качества регулирования системы автоматического регулирования электропоезда постоянного тока»
Выполнил: Проверил:
Студент гр.ЭТ-609 Викулов И.П.
Алексеев Ю.А.
Санкт-Петербург
2012
Содержание:
|
Содержание |
2 |
|
1. Исходные данные |
4 |
|
2. Принципиальная и функциональная схемы САУ |
|
|
2.1.Пинципы функционирования САУ |
5 |
|
2.2.Функциональная схема САУ |
7 |
|
3. Статические и динамические характеристики элементов САУ |
|
|
3.1.Характеристики исполнительного устройства |
9 |
|
3.2.Характеристики объекта регулирования |
10 |
|
3.3.Характеристики задатчика уставок и элемента обратной связи |
13 |
|
3.4.Характеристики регулятора тока ТЭД |
15 |
|
3.5.Характеристики фазорегулятора |
16 |
|
3.6.Структурные схемы и передаточные функции САУ |
17 |
|
3.7.Статическая ошибка регулирования САУ |
19 |
|
4. Расчёт статических и динамических характеристик элементов САУ |
|
|
4.1.Расчёт характеристик объекта регулирования |
20 |
|
4.2.Расчёт характеристик исполнительного устройства |
22 |
|
4.3.Расчёт характеристики элемента обратной связи |
23 |
|
4.4.Расчёт коэффициента усиления фазорегулятора |
23 |
|
4.5.Расчёт коэффициентов усиления САУ |
23 |
|
5. Оценка качества регулирования |
|
|
5.1.Расчёт логарифмических частотных характеристик САУ графо-аналитическим методом |
24 |
|
5.2.Оценка качества регулирования САУ |
24 |
|
5.3.Расчёт переходного процесса тока ТЭД на компьютере |
24 |
|
Вывод |
26 |
|
Библиографический список |
27 |
Цель:
практическое изучение основных положений курса «Теория Автоматического Управления» на примере расчёта устойчивости и качества регулирования системы автоматического управления режимом рекуперативного торможения электропоезда постоянного тока серии ЭТ 2.
Задачи:
· Расчёт статических характеристик и динамических параметров элементов САУ.
· Оценка устойчивости и качества регулирования САУ.
1. Исходные данные:
· Уставка тормозного тока тяговых электродвигателей Iуст=200 А.
· Расчётная скорость движения V=100 км/ч.
· Расчётные параметры контактной сети:
· напряжение Uкс=3700 В;
· сопротивление rкс=0,1 ОМ;
· индуктивность Lкс=5*10-3 Гн.
· Индуктивность реактора цепи якорей ТЭД (ИШ) Lш=10*10-3 Гн.
· Постоянная времени датчика тока якорей ТЭД Тдт=0,01 с.
2. Принципиальная и функциональная схемы САУ.
2.1. Принципы функционирования САУ.
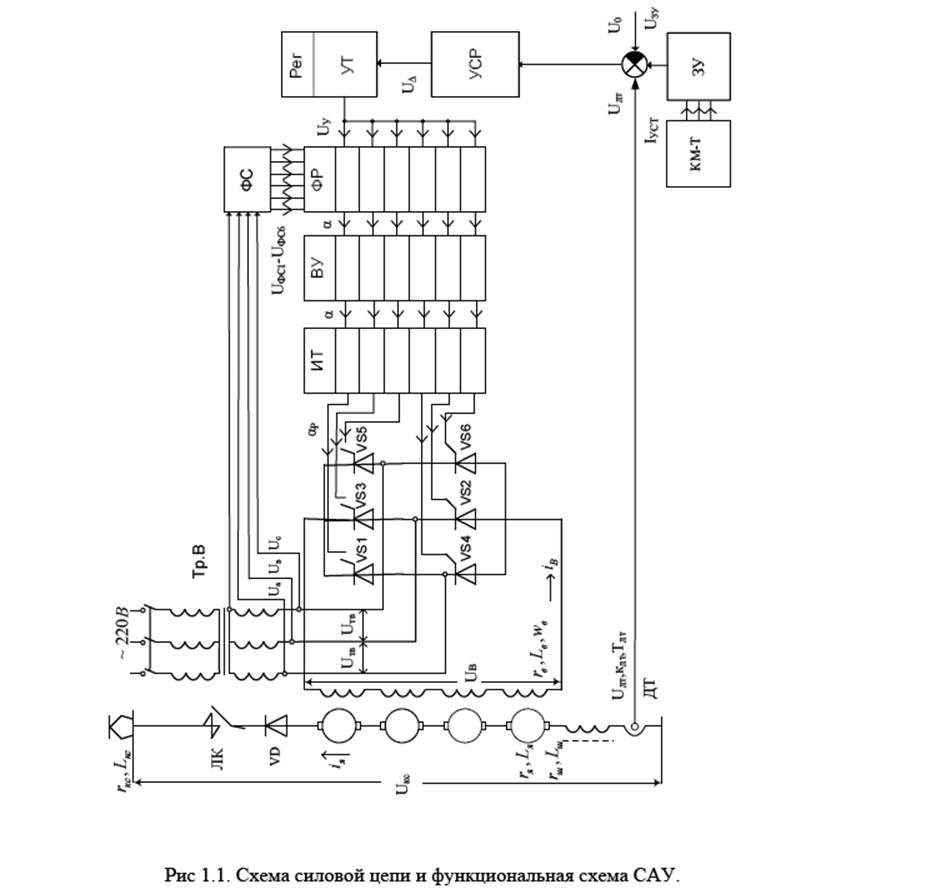
Система автоматического управления электрическим торможением электропоезда постоянного тока ЭТ 2 обеспечивает поддержание на заданном уровне (стабилизацию) тока якорей тяговых электродвигателей iя в режимах рекуперативного и реостатного замещающего торможения при независимом возбуждении ТЭД.
На функциональной схеме САУ обозначены переменные:
Uкс- напряжение контактной сети;
iяiв- токи якорей и возбуждения ТЭД;
Uв- выходное напряжение управляемого выпрямителя возбуждения;
Uтв- напряжение трансформатора возбуждения ТЭД;
Uдт- выходное напряжение датчика тока якорей ТЭД;
αр- фазовые интервалы 9УГЛЫ) отпирания тиристорных плеч УВ;
Uфс1-Uфс6- напряжение синхронизации каналов фазорегулятора.
Ток якорей ТЭД поддерживается неизменным системой автоматического управления на заданной уставке Iуст при неизмнениях уровня напряжения контактной сети Uкс и скорости движения электропоезда V.Поддержание неизменного тока якорей iя осуществляется посредством регулирования тока возбуждения iв ТЭД.
Независимое возбуждение ТЭД обеспечивается от трёхфазного управляемого выпрямителя (УВ),питаемого от трансформатора возбуждения (ТрВ).
Ток возбуждения iв регулируется автоматически посредством изменения углов αр отпирания тиристорных плеч управляемого выпрямителя.
Ток якорей iя измеряется датчиком тока (ДТ).Выходное напряжение датчика uдт осуществляет обратную связь САУ.
Уставка тока рекуперации Iуст задаётся постановкой контроллера машиниста в одно из трёх тормозных положений (КМ-Т).
Задатчик уставок тока якорей (ЗУ) формирует по одному из каналов напряжение Uзу, задающее уставку тормозного тока. Каналы ЗУ переключаются контроллером машиниста в тормозных положениях .Напряжение задатчика Uзу суммируется с напряжением датчика тока якорей Uдт и подаётся на вход усилителя сигнала рассогласования тока якорей (УСР). На вход этого усилителя подаётся также постоянное напряжение смещения (-U0) для формирования сигнала рассогласования.
Усилитель сигнала рассогласования тока якорей УСР, усиливает разность входных напряжений, создавая сигнал рассогласования U∆. Выходной сигнал УСР подаётся на вход транзисторного усилителя (УТ).
Усилитель тока усиливает мощность сигнала рассогласования U∆, и подаёт на параллельные входы шести каналов фазорегулятора (ФЗ) в виде сигнала управления Uу.
Фазовый синхронизатор (ФС) формирует по средством фазных напряжений трансформатора возбуждения (ТрВ) Ua, Ud, Uc сигналы прямоугольной формы Uфс1-Uфс6, которые осуществляют синхронизацию работы каналов фазорегулятора.
Фазорегулятор формирует сигналы прямоугольной формы и фазовым сдвигом на 60 эл. Градусов между смежными каналами и с фазовыми задержками α1-α6 относительно переднего фронта напряжений синхронизации Uфс1-Uфс6.
Выходные усилители (ВУ) формируют пакеты импульсов с фазовыми задержками α1-α6 относительно переднего фронта напряжений синхронизации.
Импульсные трансформаторы (ИТ) обеспечивают гальваническую развязку электрических цепей ВУ с управляющими электродами силовых тиристоров выпрямителя УВ.
Если в процессе регулирования ток якорей становится меньше уставки, то, соответственно уменьшается величина сигнала рассогласования УСР U∆,уменьшается выходное напряжение управления Uу, уменьшаются углы фазового регулирования αр, управляемого выпрямителя УВ.В результате ток возбуждения и ток якорей ТЭД будут увеличиваться.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.