wв – число витков полюсной катушки обмоток возбуждения ТЭД,
gвх – проводимость контура вихревых токов ТЭД,
СV – конструкционный коэффициент тягового электропривода.
Дифференциальные уравнения (6)-(8) содержат нелинейные зависимости. Поэтому необходимо выполнить их линеаризацию, т.е. надо заменить в них нелинейные зависимости линейными в ограниченном диапазоне изменения переменных ∆uкс, ∆iя, ∆uв, ∆iв, ∆(СVФ) относительно постоянных величин Uкс, Iя, Uв, Iв, СVФ:
 (9)
(9)
 (10)
(10)
 (11)
(11)
Скорость движения электропоезда V за время протекания переходных электромагнитных процессов в цепи якорей ТЭД, обусловленных изменением напряжения контактной сети ∆Uкс*1(t), можно считать практически неизменной.
Коэффициент Кф в уравнении (10) связывает линейной зависимостью изменение магнитного потока (∆СVФ) и тока возбуждения ∆iв. Коэффициент Кф является коэффициентом наклона отрезка линеаризации характеристики намагничивания (СVФ)(Iв) ТЭД:
 [Ом/(км/ч)].
(12)
[Ом/(км/ч)].
(12)
 Ом/(км/ч);
Ом/(км/ч);
Для определения операторных передаточных функций звеньев направленного действия, отображающих динамические характеристики объекта регулирования надо выразить уравнения (9)-(11) в операторной форме и преобразовать относительно выходных переменных. Напряжение ∆uв в уравнении (10) надо выразить через уравнение (3):
 (13)
(13)
 (14)
(14)
 (15)
(15)

В уравнениях (13)-(15) приняты следующие обозначения коэффициентов и постоянных времени:
 [1/Ом];
(16)
[1/Ом];
(16)
 1/Ом;
1/Ом;
 [с]
(17)
[с]
(17)
 с;
с;
 [1/Ом]
(18)
[1/Ом]
(18)
 1/Ом;
1/Ом;
 [c] (19)
[c] (19)
 с;
с;
 [c] (20)
[c] (20)
 с;
с;
![]() [км/ч]
(21)
[км/ч]
(21)
![]() км/ч;
км/ч;
 [(км/ч)c] (22)
[(км/ч)c] (22)
 (км/ч)с;
(км/ч)с;
Из операторных уравнений (13)-(15) следует, что цепь якорей, цепь возбуждения, а также магнитопровод тяговых электродвигателей с контуром вихревых токов представлены апериодическими звеньями 1го порядка с постоянными времени Тя, Тв, Твх, характеризующими инерционность этих цепей. Операторное уравнение (13) содержит кроме того дифференцирующее звено с коэффициентом Кw, отображающее действие э.д.с. самоиндукции обмоток возбуждения ТЭД. Коэффициенты Кя, Кв, Кv, Кф в уравнениях (12)-(14) представляют собой коэффициенты усиления возмущающего ∆Uкс и регулирующего ∆iв воздействий на выходную переменную – ток якорей ТЭД ∆iя.
3.3. Характеристики задатчика уставок и элемента обратной связи.
В нейтральном положении КМ напряжение питания цепей управления Uпит=110 В подаётся на вход А. Конденсатор С1 заряжается до напряжения Uзу, равного напряжению стабилизации стабилитронов VD1-VD11. Фазорегулятор ФР в этом случае формирует угол регулирования управляемого выпрямителя УВ αр>90о, при котором управляемый мост будет заперт, а токи возбуждения и якорей равны нулю.
В тормозном положении КМ-1Т напряжение питания цепей управления Uпит=110 В подаётся на вход Б. Напряжение Uзу на конденсаторе С1 плавно снижается до уровня напряжения стабилизации стабилитронов VD7, VD8. При этом фазорегулятор ФР уменьшает фазовый угол регулирования до αр< 90о, при котором управляемый выпрямитель УВ отпирается. В результате тиристорный управляемый мост плавно повышает ток возбуждения iв и ток якорей iя ТЭД от нуля до минимальной уставки.

В положении КМ-2Т напряжениеUпит=110 В подаётся на вход В. Напряжение Uзу на конденсаторе С1 устанавливается равным напряжению стабилизации стабилитрона VD6. Фазорегулятор, в этом случае, уменьшает угол регулирования управляемого выпрямителя, повышая токи возбуждения и якорей ТЭД.
В положении КМ-3Т напряжение Uпит=110 В подаётся на входы В и Г. При этом транзистор VT1 открывается и шунтирует конденсатор С1, напряжение на котором понижается до нуля Uзу=0. В этом случае задатчиком устанавливается максимальная уставка тока якорей ТЭД.
Конденсатор С1 с резисторами цепей заряда R1-R4 характеризуется апериодическим звеном 1-го порядка с постоянной времени Тзу, инерционность которого обеспечивает плавное изменение напряжения Uзу, задающего уставку и соответственно, плавное изменение тормозного тока ТЭД. Операторное уравнение сигнала ЗУ с передаточной функцией апериодического звена 1-го порядка имеет следующий вид:
![]()
 (23)
(23)
Датчик тока якорей ДТ представляет собой трансформатор постоянного тока. Выходное напряжение датчика Uдт подведено от выпрямительной цепи ДТ к резистору R7. Параллельно этому резистору включён потенциометр R8, предназначенный для регулирования коэффициента усиления датчика тока при настройке САУ. Характеристика датчика тока якорей линейна (сплошная линия на рис.7)
![]()
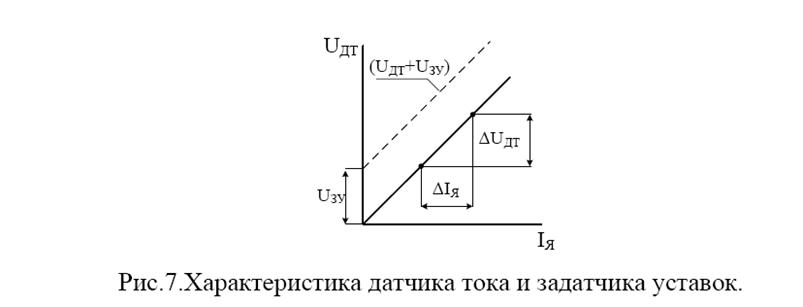
Коэффициент наклона характеристики, представляющий собой коэффициент усиления датчика Кдт, определяется числом витков рабочей обмотки wр, с сопротивлением выходного резистора R7 и коэффициентом КR8 регулировочного потоенциометра R8:
 [Ом].
(24)
[Ом].
(24)
Выходной сигнал датчика тока якорей Uдт суммируется с напряжением конденсатора С1 Uзу. Характеристика датчика тока якорей смещается на величину Uзу, как на рис.7 штрихом. Суммарное напряжение (Uдт+Uзу) подаётся в усилитель сигнала рассогласования УСР тока якорей ТЭД.
Динамическая характеристика датчика тока якорей определяется операторным уравнением, содержащим апериодическое звено 1-го порядка с постоянной времени Тдт:
![]() (25)
(25)
3.4. Характеристики регулятора тока ТЭД.
Регулятор тока ТЭД состоит из усилителя сигнала рассогласования УСР и усилителя тока УТ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.