-
Дифференциальное уравнение можно приближенно записать в виде разностного уравнения.
-
Рассмотрим вопрос о том, как найти выходной сигнал y(t), зная разностное уравнение и значения входного сигнала x(t), то есть как решить разностное уравнение.
63
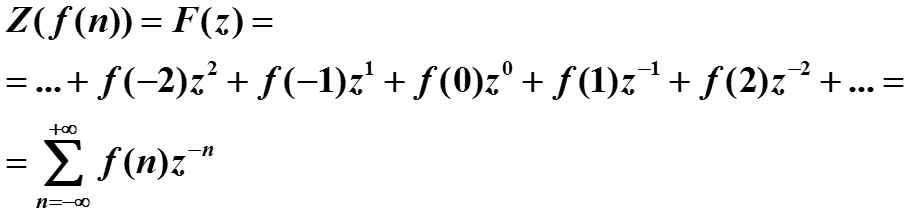
6.6. z-преобразование
-
Положит T = 1 и применим к дискретному сигналу f(n) z-преобразование, переводом разностного уравнения в частотную область можно получить его решение.

-
В общем случае z – комплексная переменная.
-
Выполним z-преобразование для нескольких примеров.
64
6.6. z-преобразование
-
Пример. Найти z-преобразование сигнала δ1(t).

-
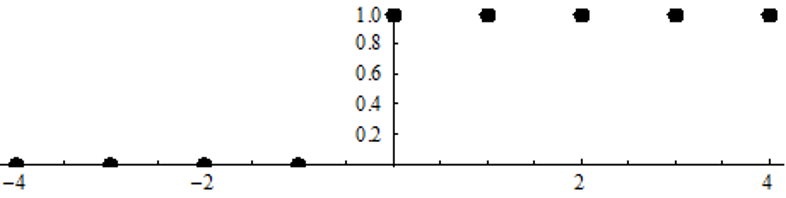
Пример. Найти z-преобразование дискретной функции Хевисайда :

65
6.6. z-преобразование
-
Если |z| > 1, то Z(1(n)) равно

-
Если |z| ≤ 1, z-преобразования для 1(n) не существует.
-
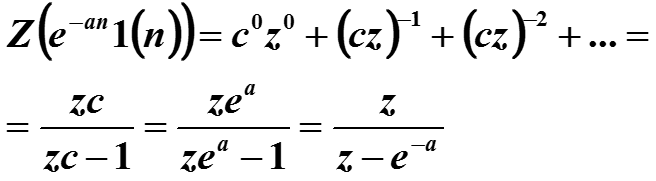
Пример. Найти z-преобразование сигнала , а > 0.



66
6.6. z-преобразование
-
если знаменатель геометрической прорессии по модулю меньше единицы, то есть, если |z| > e-a .
-
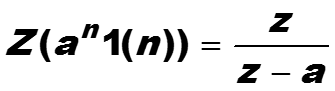
Аналогично получается

-
Это преобразование существует, если |z| > a-1 .
67
6.6. z-преобразование
-
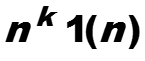
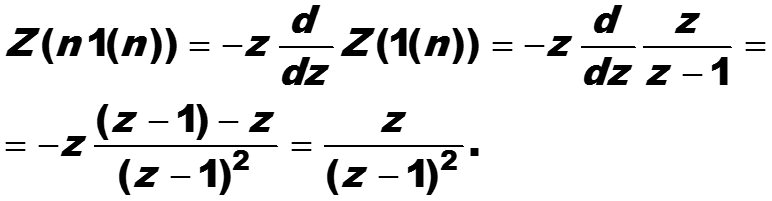
Пример. z-преобразование степенных функций nk1(n)
-
Построим рекурсивную формулу z-преобразований, рекурсия проводится по степени k. Если известна форму-ла зависимости преобразования для nk1(n) от n(k-1)1(n), то вычисление формулы для nk1(n) можно выполнить следующим способом.
-
Для k = 0 степенная функция представляет собой просто дискретную функцию Хевисайда, для 1(n) z-преобразо-вание известно, оно вычисляется как сумма геометричес-кой прогрессии.
-
По формуле зависимости находим z-преобразование для k = 1, от него для k = 2, затем для k = 3 и так далее до нужной степени k.

68
6.6. z-преобразование
-
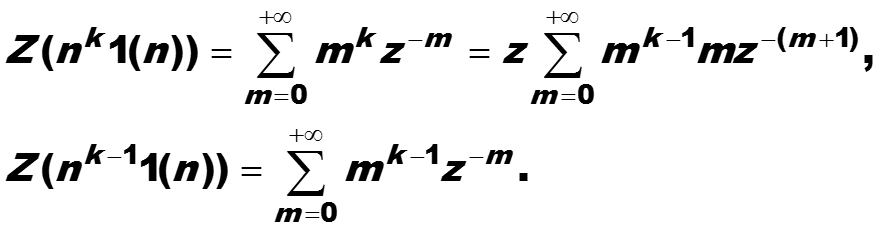
Пример. z-преобразование степенных функций
-
По определению z-преобразования:

-
Предполагая, что все ряды, участвующие в преобразованиях, сходятся абсолютно, дифференцируем по z второе равенство:

69
6.6. z-преобразование
-
Сравнивая (*) с производной, получаем

-
Это выражение позволяет рекурсивно, начиная с k = 0, найти z-преобразования сигнала для любых по-
-
ложительных целых k. Так, для k = 1


70
6.6. z-преобразование
-
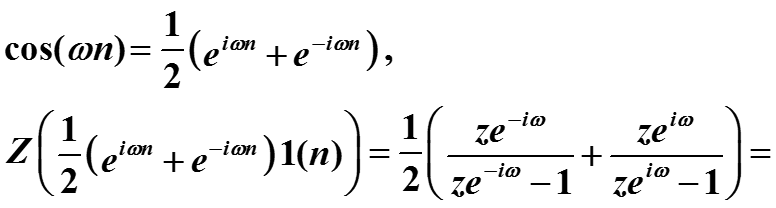
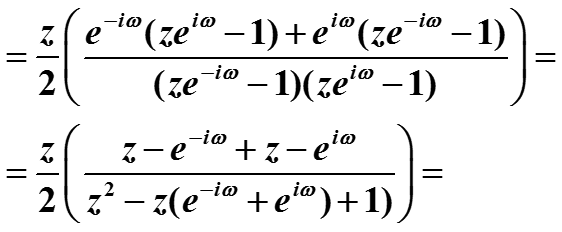
Пример (преобразование тригонометрических функций). Найти z-преобразование сигнала
-
Представим косинус в комплексной форме (формула Эйлера) и воспользуемся преобразованием экспонент.

71
6.6. z-преобразование

-
Аналогично получается z-преобразование сигнала


72
6.7. Свойства z-преобразования
-
1. Линейность
-
Z(a f(n) + b g(n)) = a F(z) + b G(z)
-
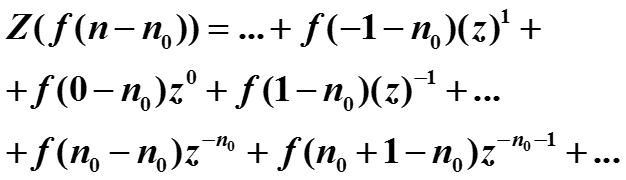
2. Свойство сдвига (задержки)
-
Z(f(n-n0)) = F(z) z -n0
-
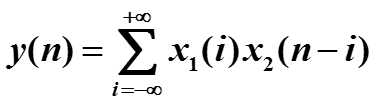
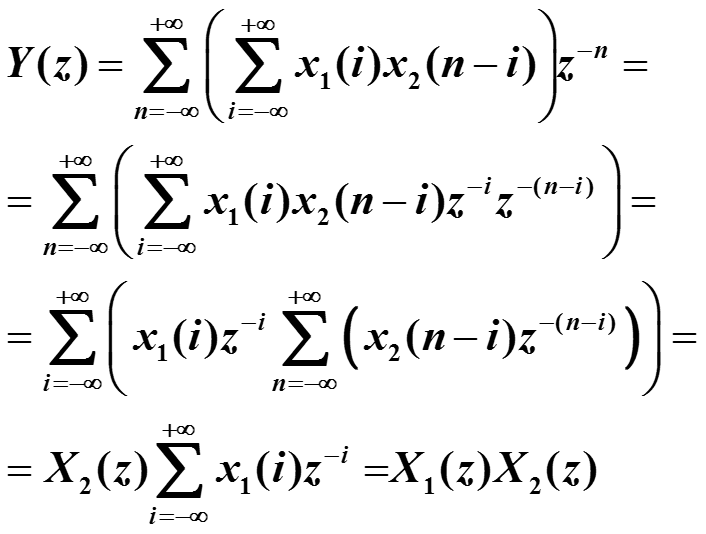
3. z-преобразование свертки
-
Если y(n) – свертка сигналов x1(n) и x2(n) , то
-
Y(z) = X1(z) X2(z)

73
6.7. Свойства z-преобразования
-
Свойство сдвига. Найти z-преобразование сигнала со сдвигом f(n - n0), если Z(f(n))=F(z).


-
Предполагая, что ряды сходятся абсолютно, первый ряд, равный F(z), умножим на z-n0 и получим второй ряд. То есть

74
6.7. Свойства z-преобразования
-
Сверткой двух дискретных сигналов x1(n) и x2(n), где n пробегает целые числа от -∞ до +∞, называется сигнал
-
z-преобразование свертки. Если ряды, представляющий z-преобразования сигналов x1(n) и x2(n) сходятся абсолютно, то z-преобразование свертки равно произведению z-преобразований исходных сигналов :
-
Y(z) = X1(z) X2(z)
-
Утверждение доказывается перестановкой членов ряда.

75
6.7. Свойства z-преобразования

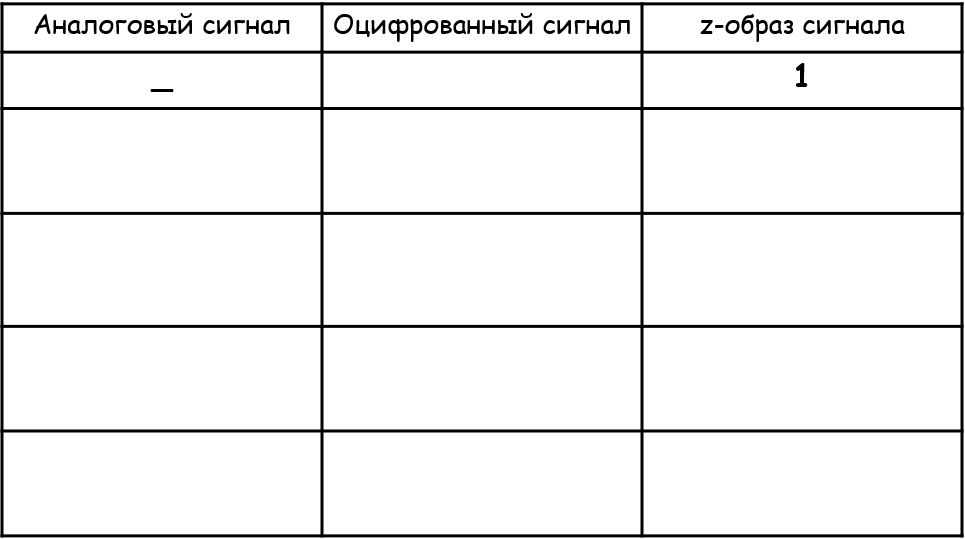
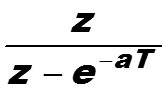
76
6.7. Свойства z-преобразования
Таблица z-преобразования (1)






77
6.7. Свойства z-преобразования