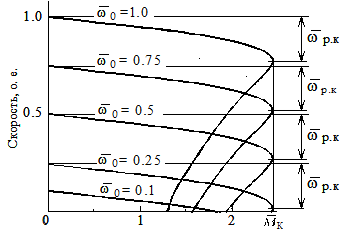
Таким образом, при частотном регулировании Рис.1.9. Механические характеристикидля механических характеристик свойственно:
1) Уменьшение величины критического момента при уменьшении частоты f1;
2) При уменьшении частоты увеличиваются критическое скольжение и наклон механических характеристик.
Указанные обстоятельства требуют дополнительных мер для формирования требуемых механических характеристик.
Среди производственных механизмов, в которых используются частотно-регулируемые электроприводы, более всего распространены механизмы с невысокими требованиями по диапазону и точности регулирования скорости, быстродействию и другим дополнительным функциям. Для большинства из них основными вопросами являются: хорошая энергетика и, прежде всего, необходимые значения моментов во всех режимах и во всем диапазоне регулирования. Основные режимы – установившиеся, а главное требование к динамике – плавность управления. При таких требованиях вполне пригодна нелинейная механическая характеристика, свойственная асинхронным двигателям. Тем более, что в частотно-регулируемых электроприводах двигатели работают только на рабочих участках механических характеристик (s < sk) при моментах не больше номинального, где они достаточно линейны.
При этом может потребоваться решение двух задач: обеспечение необходимых значений электромагнитных моментов во всем диапазоне регулирования скорости и дополнительно, если потребуется, - увеличение жесткости механических характеристик. Для решения указанных задач используются простейшие, и потому наиболее распространенные, преобразователи частоты со стандартным управлением, называемым также скалярным или U/f - регулированием. Формирование требуемых механических характеристик выполняется использованием одной или двух компенсирующих (обратных) связей, получивших названия IR–компенсация и компенсация скольжения.
Однако при практической реализации подобных электроприводов возникает ряд проблем, обусловленных сложностью рассмотренных выше электромагнитных процессов: в функции каких переменных должны работать эти связи; на какие переменные они должны воздействовать; каким должен быть их характер и ряд других особенностей.
Ее назначение
– при увеличении нагрузки и, соответственно, тока![]() частично
или полностью скомпенсировать уменьшение потокосцепления и момента двигателя.
Так как первопричиной этого факта является падение напряжения, создаваемое
током
частично
или полностью скомпенсировать уменьшение потокосцепления и момента двигателя.
Так как первопричиной этого факта является падение напряжения, создаваемое
током ![]() на активном сопротивлении
обмотки статора R1 , то естественным решением является увеличение
пропор-ционально ему выходного напряжения преобразователя
на активном сопротивлении
обмотки статора R1 , то естественным решением является увеличение
пропор-ционально ему выходного напряжения преобразователя ![]() так, чтобы частично или
полностью скомпенсировать падение напряжения
так, чтобы частично или
полностью скомпенсировать падение напряжения ![]() :
:
![]() ,
(1.30)
,
(1.30)
где : ![]() - напряжение,
определяемое базовой характеристикой,
- напряжение,
определяемое базовой характеристикой, ![]() -
коэффициент обратной связи по току. Тем самым достигается увеличение главного
потокосцепления
-
коэффициент обратной связи по току. Тем самым достигается увеличение главного
потокосцепления![]() вплоть до его
стабилизации, а момент двигателя доводится до требуемых значений Мтр
при наименьшей из заданных скоростей
вплоть до его
стабилизации, а момент двигателя доводится до требуемых значений Мтр
при наименьшей из заданных скоростей ![]() . Таким образом,
IR–компенсация – должна быть положительной обратной
связью по току статора, действующей по каналу напряжения.
. Таким образом,
IR–компенсация – должна быть положительной обратной
связью по току статора, действующей по каналу напряжения.
 Теоретически
при полной компенсации падения напряжения на сопротивлении обмотки статора (
Теоретически
при полной компенсации падения напряжения на сопротивлении обмотки статора (![]() ) критический момент будет
постоянным во всем диапазоне регулирования скорости, как это показано на
рис.1.10. Однако добиваться выполне-ния данного условия не обязательно, т.к.
из-за нелинейности характеристик это потребует установки дополнительного
функционального преобразователя, что значительно усложнит задачу. Обычно
достаточно обеспечить М = Мтр при наи- меньшей из заданных скоростей
) критический момент будет
постоянным во всем диапазоне регулирования скорости, как это показано на
рис.1.10. Однако добиваться выполне-ния данного условия не обязательно, т.к.
из-за нелинейности характеристик это потребует установки дополнительного
функционального преобразователя, что значительно усложнит задачу. Обычно
достаточно обеспечить М = Мтр при наи- меньшей из заданных скоростей ![]() . Следует так Рис.1.10
Механические характеристики же иметь в виду, что увеличение
. Следует так Рис.1.10
Механические характеристики же иметь в виду, что увеличение ![]() может привести при полной
компенсации (
может привести при полной
компенсации (![]() ) к увеличению колебательности и
даже потере устойчивости системы.
) к увеличению колебательности и
даже потере устойчивости системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.