 На рис.1.5 представлены кривые потокосцепления
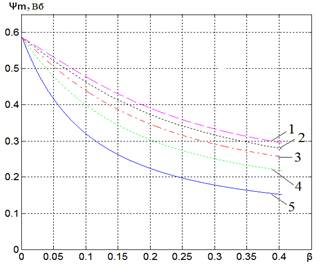
На рис.1.5 представлены кривые потокосцепления ![]() при изменении нагрузки и частоты,
рассчитанные по (1.14). Они построены в функции абсолютного скольжения
при изменении нагрузки и частоты,
рассчитанные по (1.14). Они построены в функции абсолютного скольжения ![]() для частот: f1 = 50; 40; 30; 20 и 10 Гц
(соответственно кривые 1 ÷ 5). Как видно из графика, потокосцепление при
увеличении нагрузки уменьшается, и тем больше, чем меньше частота питающего
напряжения f1.
При частоте 50 Гц, номинальной для двигателя DT80N4, и абсолютном скольжении
для частот: f1 = 50; 40; 30; 20 и 10 Гц
(соответственно кривые 1 ÷ 5). Как видно из графика, потокосцепление при
увеличении нагрузки уменьшается, и тем больше, чем меньше частота питающего
напряжения f1.
При частоте 50 Гц, номинальной для двигателя DT80N4, и абсолютном скольжении ![]() =
0,2 потокосцеп-ление снижается в 1,5 раза, а при частоте f1 = 10 Гц в 2,5 раза. Как видно из
графика, уменьше-ние
=
0,2 потокосцеп-ление снижается в 1,5 раза, а при частоте f1 = 10 Гц в 2,5 раза. Как видно из
графика, уменьше-ние ![]() особенно значительно при
меньших нагрузках и частотах. Уменьшение
особенно значительно при
меньших нагрузках и частотах. Уменьшение ![]() при
увеличении нагрузки объясняется тем, что возрастающий при этом ток обмотки статора
при
увеличении нагрузки объясняется тем, что возрастающий при этом ток обмотки статора
![]() создает дополнительное падение
напряжения ее сопротивлениях. При неизменном напряже-нии питания
создает дополнительное падение
напряжения ее сопротивлениях. При неизменном напряже-нии питания ![]() это влечет за собой,
согласно Рис.1.5. Кривые потокосцепления
это влечет за собой,
согласно Рис.1.5. Кривые потокосцепления![]()
(2.23), уменьшение ЭДС е1,
потокосцепления ![]() , при изменении
нагрузки и частоты и как результат
, при изменении
нагрузки и частоты и как результат ![]() . Степень влияния
этого фактора зависит от соотношения активного и индуктивного сопротивлений
обмотки статора. При больших частотах оно проявляется слабее из-за
преобладающего влияния сопротивления контура намагничивания
. Степень влияния
этого фактора зависит от соотношения активного и индуктивного сопротивлений
обмотки статора. При больших частотах оно проявляется слабее из-за
преобладающего влияния сопротивления контура намагничивания ![]() . Однако при значительном снижении
частоты,
. Однако при значительном снижении
частоты, ![]() заметно уменьшается, а при низких
частотах может стать соизмеримым с R1, и даже меньше его.
заметно уменьшается, а при низких
частотах может стать соизмеримым с R1, и даже меньше его.
Из проведенного анализа можно сделать следующие выводы:
1. При идеальном холостом ходе величина потокосцепления![]() определяется отношением напряжения
к частоте и при регулировании частоты остается практически постоянной,
незначительно изменяясь только в области малых частот.
определяется отношением напряжения
к частоте и при регулировании частоты остается практически постоянной,
незначительно изменяясь только в области малых частот.
2. При изменении нагрузки главное потокосцепление ![]() не остается постоянным, а
изменяется и тем значительнее, чем глубже регулирование частоты. Основная
причина этого – влияние падения напряжения на активном сопротивлении обмотки
статора R1
.
не остается постоянным, а
изменяется и тем значительнее, чем глубже регулирование частоты. Основная
причина этого – влияние падения напряжения на активном сопротивлении обмотки
статора R1
.
Исследование поведения тока статора при различных режимах работы двигателя представляет интерес по нескольким причинам. Во-первых, он является основной причиной уменьшения главного потокосцепления и ухудшения всех характеристик двигателя, прежде всего механической. Во-вторых, при U/f – управлении в функции тока статора работают компенсирующие связи, и характер его поведения существенно влияет на их работу. В-третьих, именно по току статора производится оценка энергосбережения.
На основе схемы замещения (рис. 1.2) было получено выражение для тока статора:
 , (1.27)
, (1.27)
 устанавливающее связь
устанавливающее связь ![]() с
током намагничивания
с
током намагничивания ![]() , который, в свою очередь,
связан с потокосцеплением:
, который, в свою очередь,
связан с потокосцеплением: ![]() . В соответствии
со схемой замещения
. В соответствии
со схемой замещения ![]() является реактивной
составляющей тока статора, а его активной составляющей служит ток ротора
является реактивной
составляющей тока статора, а его активной составляющей служит ток ротора ![]() , приведенный к статору. Полный ток
обмотки статора
, приведенный к статору. Полный ток
обмотки статора ![]() определяется суммой
векторов
определяется суммой
векторов ![]() и
и ![]() ,
его модуль равен
,
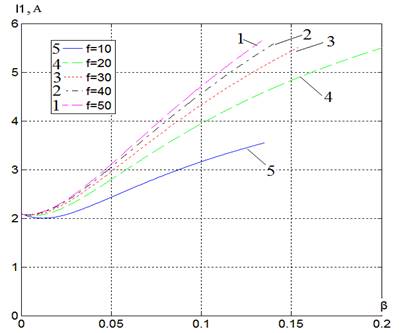
его модуль равен ![]() . На рис.1.7,а для
двигателя DT80N4 построены
кривые тока
. На рис.1.7,а для
двигателя DT80N4 построены
кривые тока ![]() , рассчитанные по (1.27) для
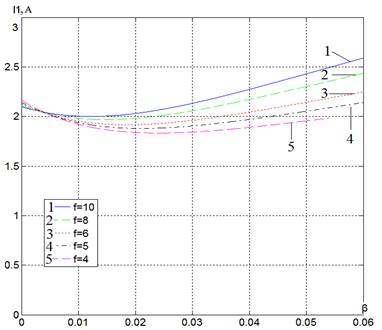
нескольких частот, а на рис.1.7,б те же кривые построены в увеличенном масштабе
при малых токах и частотах.
, рассчитанные по (1.27) для
нескольких частот, а на рис.1.7,б те же кривые построены в увеличенном масштабе
при малых токах и частотах.
 а) б)
а) б)
Рис.1.7. Кривые тока статора ![]() в зависимости от
изменения нагрузки и частоты: а) при частотах f1
=10÷50 Гц; б) при малых
частотах (f1 = 10÷4
Гц) и нагрузках.
в зависимости от
изменения нагрузки и частоты: а) при частотах f1
=10÷50 Гц; б) при малых
частотах (f1 = 10÷4
Гц) и нагрузках.
Как следует из рис.1.7,а, для данного двигателя ток намагничивания ![]() равен
2,1А (
равен
2,1А (![]() ). При
увеличении нагрузки β =
). При
увеличении нагрузки β =![]()
![]() ток
ток
![]() растет за счет его активной
составляющей, изменяясь по нелинейному закону. Как следует из выражения (1.27),
темп нарастания тока зависит от частоты, т.к. индуктивное сопротивление в
числителе больше, чем в знаменателе. При бóльших частотах ток при увеличении
нагрузки растет интенсивнее, что объясняется зависимостью потокосцепления
растет за счет его активной
составляющей, изменяясь по нелинейному закону. Как следует из выражения (1.27),
темп нарастания тока зависит от частоты, т.к. индуктивное сопротивление в
числителе больше, чем в знаменателе. При бóльших частотах ток при увеличении
нагрузки растет интенсивнее, что объясняется зависимостью потокосцепления ![]() не только от нагрузки, но и от
частоты.
не только от нагрузки, но и от
частоты.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.