 а) б)
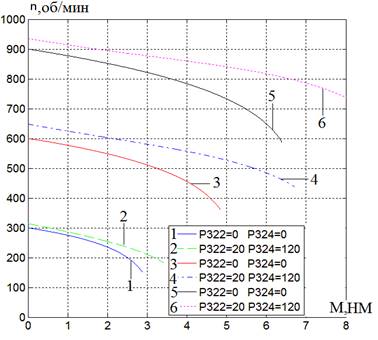
Рис. 1.14. Механические характеристики при различных сочетаниях компенсаций
а) б)
Рис. 1.14. Механические характеристики при различных сочетаниях компенсаций
Сравнение характеристик при скорости 900 об/мин показывает следующее: 1) в приводе без компенсаций номинальный момент (5,0 Нм) достигается, но при частоте скольжения 150 об/мин (номинальная – 120 об/мин), максимальный момент равен 6,3 Нм (1,2 Мном); 2) при действии обеих связей с недокомпенсацией (Р322 = 10; Р324 = 90) номинальный момент достигается при частоте 100 об/мин (меньше номинальной), максимальный момент равен 8,5 Нм (1,7 Мном); 3) при полной компенсации (Р322 = 20; Р324 = 120) и номинальной частоте скольжения момент выше номинального и равен 6,5 Нм (1,3 Мном), максимальный момент равен 9,5 Нм (1,9 Мном); 4) при перекомпенсации (Р322 = 30; Р324 = 150) частота скольжения при номинальном моменте равна 50 об/мин, а максимальный момент равен 11,7 Нм (2,35 Мном).
Приведенные данные говорят об эффективности действия компенсирующих связей и необходимости их обязательного использования в преобразователях с U/f – управлением.
1. Основная проблема, решаемая при частотном регулировании, – формирование значений момента двигателя, требуемых по условиям работы, во всем диапазоне регулирования скорости.
2. Электромагнитный момент и другие переменные и
характеристики двигателя определяются, прежде всего, величиной главного
потокосцепления ![]() .
.
3. Величина главного потокосцепления при идеальном холостом ходе (s = 0) однозначно определяется величиной отношения U/f, задаваемого базовой характеристикой преобразователя.
4. При увеличении нагрузки ![]() уменьшается
и тем значительнее, чем меньше частота питающего напряжения. Уменьшение
уменьшается
и тем значительнее, чем меньше частота питающего напряжения. Уменьшение ![]() происходит из-за роста падения
напряжения на активном сопротивлении обмотки статора.
происходит из-за роста падения
напряжения на активном сопротивлении обмотки статора.
5. Ток обмотки статора I1 при s = 0 чисто реактивный, используемый для создания магнитного потока, на низких скоростях при увеличении нагрузки сначала уменьшается и только с некоторой задержкой начинает возрастать.
6. Нелинейность механической характеристики обусловлена влиянием индуктивного сопротивления обмотки ротора х2. Она может стать линейной только при компенсации этого влияния, достигаемого стабилизацией потокосцепления ротора.
1.5. Методы формирования требуемых динамических характеристик
Динамическими характеристиками называют кривые изменения переменных во времени в переходных процессах по управляющему или возмущающему воздействиям, как правило, при ступенчатом задании этих воздействий.
Основные виды переходных процессов по управляющему воздействию – пуск, остановка, реверс и изменение задания по скорости. Каждый из них имеет свои особенности и предъявляемые к нему требования. Основная динамическая характеристика – диаграмма скорости, представляющая собой зависимость скорости от времни на всех указанных интервалов. Вторая важная характеристика – токовая, по ней оцениваются силовые и предельные возможности привода. Изменение других переменных (частоты, напряжения и др.) исследуются по мере необходимости для анализа работы системы управления.
Переходные процессы по возмущающему воздействию – это изменение во времени при ступенчатом, если не указаны другие условия, изменении момента нагрузки. При этом наибольший интерес представляют: максимальное значение динамической ошибки по скорости, время и характер переходного процесса при приеме/сбросе нагрузки.
В электроприводах без датчика скорости, рассматриваемых в данном разделе, к переходным процессам по возмущающему воздействию особых требований, как правило, не предъявляется, и основная задача сводится к формированию требуемых диаграмм скорости и величины пускового момента.
1.5.1. Пуск двигателя при частотном управлении
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.