Для того, чтобы
сделать обоснованный выбор коэффициента ![]() и
оценить его влияние, необходимо выполнить расчет механических характеристик
системы U/f – управления с IR–компенсацией. Для этого предварительно, задаваясь
значениями sи используя выражение (1.27)
рассчитывается ток статра
и
оценить его влияние, необходимо выполнить расчет механических характеристик
системы U/f – управления с IR–компенсацией. Для этого предварительно, задаваясь
значениями sи используя выражение (1.27)
рассчитывается ток статра![]() , а затем по
(1.30) напряжение преобразователя
, а затем по
(1.30) напряжение преобразователя ![]() и по (1.29)
механические характеристики. Необходимое значение
и по (1.29)
механические характеристики. Необходимое значение ![]() устанавливается
при настройке заданием в меню преобразователя параметра «IR–компенсация».
устанавливается
при настройке заданием в меню преобразователя параметра «IR–компенсация».
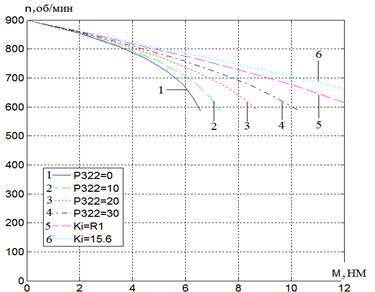
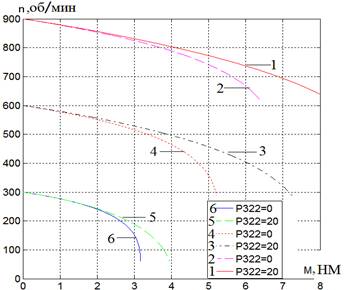
В качестве
примера на рис.1.11,а представлены механические характеристики двигателя СТ 80 N4, рассчитанные для скоростей: 300; 600; 900 об/мин и двух
значений коэффициента ![]() , соответствующих
параметрам меню Р322 = 0 и Р322 = 20, а на рис.1.11,б – характеристики на
скорости 900 об/мин при различных степенях компенсации. Они рассчитаны для
токов в границах заданного предельного значения тока статора
, соответствующих
параметрам меню Р322 = 0 и Р322 = 20, а на рис.1.11,б – характеристики на
скорости 900 об/мин при различных степенях компенсации. Они рассчитаны для
токов в границах заданного предельного значения тока статора ![]() и подтверждают, что при
использовании IR–компенсации момент двигателя может
быть значительно увеличен.
и подтверждают, что при
использовании IR–компенсации момент двигателя может
быть значительно увеличен.
Так, на скорости 600 об/мин (рис.11.1,а) максимальный момент больше номинального (5 Нм) даже без компенсаций (Р322 = 0), а при ее использовании значительно возрастает. Но при скорости 300 об/мин он меньше номинального даже при действии компенсации (Р322 = 20).
 а)
б)
а)
б)
Рис.1.11. Механические характеристики при различных степенях компенсации
Механические характеристики, представленные на рис.1.11,б, показывают, что теоретически при скорости 900 об/мин усилением действия компенсации даже в границах предельного тока статора можно достичь моментов в два и более раз больше номинального.
 Однако при
технической реализации возникает вопрос о начале действия IR–компенсации.
Во-первых, даже при идеальном холостом ходе
Однако при
технической реализации возникает вопрос о начале действия IR–компенсации.
Во-первых, даже при идеальном холостом ходе ![]() равен
не нулю, а току намагничивания, составляющему примерно
равен
не нулю, а току намагничивания, составляющему примерно ![]() ,
и положительная обратная связь может привести к самовозбуждению и росту
насыщения магнитной системы. Во-вторых, из-за особенности изменения тока
,
и положительная обратная связь может привести к самовозбуждению и росту
насыщения магнитной системы. Во-вторых, из-за особенности изменения тока ![]() при малых нагрузках при увеличении
нагрузки ток статора сначала уменьшается (рис.1.7,б) и только после
выравнивания падений напряжения на активном и индуктивном сопротивлениях его
обмотки начинается увеличение
при малых нагрузках при увеличении
нагрузки ток статора сначала уменьшается (рис.1.7,б) и только после
выравнивания падений напряжения на активном и индуктивном сопротивлениях его
обмотки начинается увеличение ![]() . В результате
будет происходить не рост добавочного напряжения, а его уменьшение. Поэтому в
реальных преобразователях сделано так, чтобы компенсация начинала работать
только при токах несколько больших тока намагничивания, т.е. работает как
задержанная обратная связь.
. В результате
будет происходить не рост добавочного напряжения, а его уменьшение. Поэтому в
реальных преобразователях сделано так, чтобы компенсация начинала работать
только при токах несколько больших тока намагничивания, т.е. работает как
задержанная обратная связь.
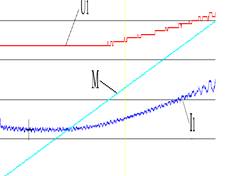

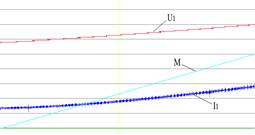
а) 200 об/мин б) 250 об/мин в) 600 об/мин
Рис.1.12. Экспериментальные кривые момента, тока и напряжения при различных скоростях.
На рис. 1.12 представлены экспериментально снятые
кривые момента, тока и напряжения при различных скоростях. Они отражают
характер изменения тока статора и начало действия компенсации: при скорости 200
об/мин напряжение ![]() не увеличивается, т.е.
она вооще не работает, т.к. ток не достигает заданного значения начала работы
вплоть до снижения скорости до нуля. При скорости 250 об/мин она работает, т,к.
не увеличивается, т.е.
она вооще не работает, т.к. ток не достигает заданного значения начала работы
вплоть до снижения скорости до нуля. При скорости 250 об/мин она работает, т,к. ![]() начинает расти, но только при
достижении током определенного значения, а вот при скорости 600 об/мин она
работает, начиная практически с холостого хода.
начинает расти, но только при
достижении током определенного значения, а вот при скорости 600 об/мин она
работает, начиная практически с холостого хода.
Очень
показательны кривые тока обмотки статора, рассчитанные для нескольких значений ![]() при скорости 600 об/мин,
представленные на рис.1.13. При отсутствии компенсаций (
при скорости 600 об/мин,
представленные на рис.1.13. При отсутствии компенсаций (![]() )
ток при увеличении нагрузки быстро нарастает по нелинейной зависимости до
предельного значения, что связано со значительным уменьшением
)
ток при увеличении нагрузки быстро нарастает по нелинейной зависимости до
предельного значения, что связано со значительным уменьшением ![]() .
.
 С увеличением
степени компенсации: 1) ток достигает предельных значений
при значительно бóльших моментах; 2) появляется
и расширяется зона линейной зависимости тока от нагрузки, что говорит о достижении постоянства
С увеличением
степени компенсации: 1) ток достигает предельных значений
при значительно бóльших моментах; 2) появляется
и расширяется зона линейной зависимости тока от нагрузки, что говорит о достижении постоянства
![]() .
.
Расчеты механических
характеристик и кривых тока статора позволяют на предварительном этапе
определить значения коэффициентов ![]() , необходимые для
формирования требуемых характеристик привода и выбора преобразователя.
, необходимые для
формирования требуемых характеристик привода и выбора преобразователя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.