где ![]() = Фw1 и
= Фw1 и
![]() = Фw2 - полные
потокосцепления фазных обмоток статора и ротора, создаваемые как током данной
обмотки, так и токами всех остальных обмоток статора и ротора. Для построения
схемы замещения используется метод комплексных амплитуд и все переменные представляются в
комплексной форме, что отмечается точкой сверху. После преобразований [Л.1;
п.1.2] получается система уравнений, описывающих в установившемся режиме
электромагнитные процессы в асинхронном двигателе:
= Фw2 - полные
потокосцепления фазных обмоток статора и ротора, создаваемые как током данной
обмотки, так и токами всех остальных обмоток статора и ротора. Для построения
схемы замещения используется метод комплексных амплитуд и все переменные представляются в
комплексной форме, что отмечается точкой сверху. После преобразований [Л.1;
п.1.2] получается система уравнений, описывающих в установившемся режиме
электромагнитные процессы в асинхронном двигателе:
![]() (1.4)
(1.4)
![]() (1.5)
(1.5)
![]() (1.6)
(1.6)
![]() ;
(1.7)
;
(1.7)
![]() (1.8)
(1.8)
Т – образная схема замещения (рис.1.2) строится по уравнениям (1.4) и (1.5). Направления стрелок для ЭДС указывается согласно общепринятому для цепей переменного тока правилу: за положительное принимается направление ЭДС, совпадающее с направлением тока.
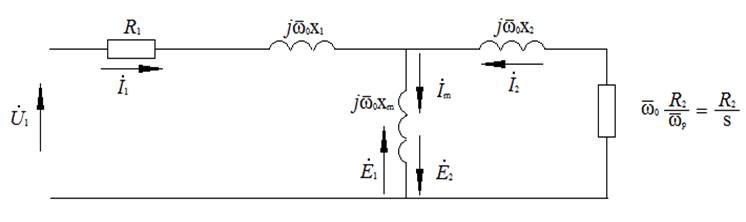
Рис.1.2. Т – образная схема замещения асинхронного двигателя.
Как известно, не весь магнитный
поток Ф участвует в создании момента, а только та его часть, которая
пронизывает обе обмотки. Часть потока, охватывающая витки только своей же обмотки,
называется потоком рассеяния, а охватывающая обе обмотки – главным потоком. Для
удобства в схеме замещения главный поток выражен через ток намагничивания Im и условно представляется в виде отдельного
намагничивающего контура. Потоки учитываются с помощью индуктивностей или
индуктивных сопротивлений. Соответственно: ![]() –
индуктивность намагничивающего контура (главная),
–
индуктивность намагничивающего контура (главная), ![]() –
его индуктивное сопротивление;
–
его индуктивное сопротивление; ![]() и
и ![]() – индуктивность и индуктивное
сопротивление рассеяния обмотки статора;
– индуктивность и индуктивное
сопротивление рассеяния обмотки статора; ![]() и
и
![]() – индуктивность и индуктивное
сопротивление рассеяния обмотки ротора.
– индуктивность и индуктивное
сопротивление рассеяния обмотки ротора.
Следует иметь в виду, что величина индуктивности
пропорциональна магнитной проницаемости материала, по которому проходит поток.
Для главной индуктивности – это зазор и магнитопровод (сталь), а для потоков
рассеяния – воздух. Магнитная проницаемость стали определяется наклоном ее
кривой намагничивания Ф = f (Im)
– постоянным в начальной (линейной) части и уменьшающимся при увеличении тока
на нелинейном участке из-за насыщения стали. Таким образом, ![]() – не постоянна по величине, но для
получения общих выводов при анализе и расчетах ее принимают постоянной, а непостоянство
учитывают только при необходимости. Магнитная проницаемость воздуха, а
следовательно, и индуктивность рассеяния постоянны.
– не постоянна по величине, но для
получения общих выводов при анализе и расчетах ее принимают постоянной, а непостоянство
учитывают только при необходимости. Магнитная проницаемость воздуха, а
следовательно, и индуктивность рассеяния постоянны.
В каталогах на двигатели обычно приводятся не индуктивности,
а индуктивные сопротивления, рассчитанные при номинальной частоте напряжения
двигателя –![]() . На рис.1.2 полные индуктивные
сопротивления обмотки равны сумме сопротивлений (например для статора
. На рис.1.2 полные индуктивные
сопротивления обмотки равны сумме сопротивлений (например для статора ![]() +
+![]() )
и представлены в комплексной форме.
)
и представлены в комплексной форме.
Для описания процессов частотного
регулировании (f = var) введем
обозначения : относительной частоты напряжения питания: ![]() , (1.9)
, (1.9)
относительной скорости двигателя: ![]() , (1.10)
, (1.10)
относительной частоты
роторной ЭДС: ![]() ,
(1.11) скольжения:
,
(1.11) скольжения:
![]() , (1.12)
, (1.12)
Примечание: При регулировании частоты используются и другие обозначения:
α = f /fН
– коэффициент относительной частоты напряжения; β – абсолютное скольжение. Они
связаны с принятыми обозначениями таким образом: α
=![]() ; β = α
; β = α![]() =
= ![]()
![]() =
=![]() .
.
При анализе процессов в асинхронном двигателе и расчетах полезно располагать векторной диаграммой, которая дает представление о связях между переменными
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.