Лекция 13. проф.
ГЛАВА 9. Синтез ДСАУ
Содержание лекции 12. Изложены процедуры модифицированного метода динамического синтеза для ИС и ЦАС. Представлены вспомогательные материалы (таблицы показателей качества), необходимые для выполнения инженерных расчетов коррекций в таких системах.
9. 5. Синтез Аналого-цифро-аналоговых систем (АЦАС)
.
9. 5. 1. Расчётная математическая модель аналого-дискретно-аналоговой электромеханической системы
Известно, что основным дискретным элементом в ЭМС является усилитель мощности (УМ). Поэтому её расчетная модель представляет собою не линейную цифро-аналоговую систему (ЦАС) (как полагают многие), а нелинейную аналого-дискретно-аналоговую (АДАС). Синтез АДАС практически не решен, что и определило необходимость этих исследований. В этом разделе представлены расчётные модели для структурно-параметрического синтеза компенсационных регуляторов для таких систем.
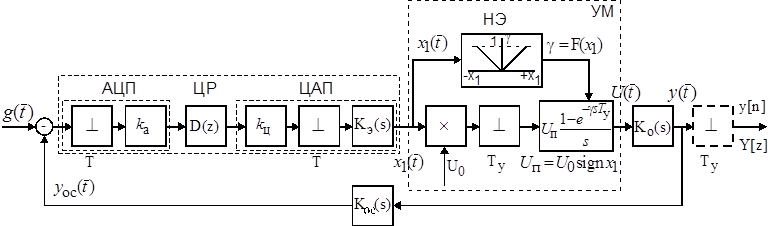
Рис.1.13 Структурная схема электромеханической системы с цифровым управлением
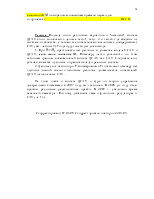
В состав типовой модели
ЭМС постоянного тока с цифровым управлением (рис.1.13) входят: цифровой
регулятор (ЦР) с дискретной передаточной функцией (ДПФ) D(z), программно
реализующей коррекцию системы; усилитель мощности (УМ), формирующий импульсы
выходного напряжения U(![]() )
с периодом коммутации Tу; непрерывный объект
управления (ОУ) с передаточной функцией (ПФ) Ko(s) и
датчик сигнала обратной связи с ПФ Kос(s).
)
с периодом коммутации Tу; непрерывный объект
управления (ОУ) с передаточной функцией (ПФ) Ko(s) и
датчик сигнала обратной связи с ПФ Kос(s).
Цифровой регулятор имеет линеаризованные модели аналого-цифрового и цифро-аналогового преобразователей (АЦП) и (ЦАП) с импульсными элементами, квантующими информацию с периодом T и модель вычислительного устройства, программно реализующего ДПФ D(z). Коэффициенты передачи АЦП и ЦАП соответственно приняты: kA=1/dA и kц=dц/1, где dAи dц - кванты аналогового и цифрового сигналов этих преобразователей. На выходе модели ЦАП имеется экстраполятор с ПФ KЭ(s). Обычно преобразователи подбираются так, чтобы dA= dц, тогда kAkц=1. Поскольку в реальных устройствах T << Tу, то дискретностью ЦР пренебрегаем. Тогда дискретную модель ЦР заменяем аналоговой с ПФ D(s).
Усилитель мощности
включает в себя нелинейный блок умножения напряжения Uо(t)
и знака сигнала sign x1(![]() ), а также ключ с
периодом коммутации Tу, на выходе которого формируется
импульсный сигнал UП[n]= Uо sign x1.
Нелинейный элемент (НЭ) преобразует сигнал x1(
), а также ключ с
периодом коммутации Tу, на выходе которого формируется
импульсный сигнал UП[n]= Uо sign x1.
Нелинейный элемент (НЭ) преобразует сигнал x1(![]() ), в относительную
ширину g импульсного напряжения U(
), в относительную
ширину g импульсного напряжения U(![]() ) выхода
формирователя. Таким образом, расчётная модель УМ сохраняет свойства дискретной
динамической нелинейности.
) выхода
формирователя. Таким образом, расчётная модель УМ сохраняет свойства дискретной
динамической нелинейности.
Часто модель датчика обратной связи представляет собою апериодическое звено с малой постоянной времени Tос и с ПФ такого вида: Kос(s)= kд( 1 +Tос s )-1» kд. Далее для упрощения решений принимаем Kос(s)» kд.
9.5. 2. Структурная схема расчётной модели АЦАС
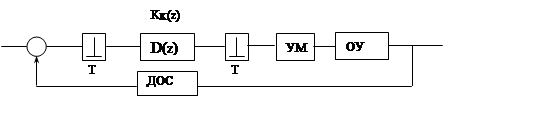
Рис.2. 13.
На рис.2. 13 изображена упрощенная функциональная схема (без раскрытия структуры блоков) описанной выше ЭМС. Здесь принято: УМ – усилитель мощности, ОУ – объект управления (электродвигатель), ДОС – датчик обратной связи. Поскольку TУ>>T, то дискретностью регулятора можно пренебречь и получить структуру, изображенную на рис3. 13.


Рис.3. 13
Возникает вопрос, как найти передаточную функцию структуры, изображенной на рис 3. 13? Ведь её входной сигнал E(s) непрерывный, а другой - выходной Y(z,0)- дискретный. В литературе такие структуры называют "непрерывно - дискретными" и предлагают специальный математический аппарат для их исследования [46, 48]. Мы предлагаем более простое решение.
 .
(1. 13)
.
(1. 13)
Приведем систему (рис. 3. 13) к более удобной расчетной структуре:


Рис. 4. 13
![]() (2. 13)
(2. 13)
 .
(3. 13)
.
(3. 13)
Итак, появился дополнительный блок со специальной разно размерной передаточной функцией (РРПФ) K(s, z)1). Теперь структурную схему расчетной модели АДАС (АЦАС) можно представить в виде, изображенном на рис. 5. 13.


Рис.5. 13
Здесь появился "блок разно размерных преобразований" (БРП). Его передаточную функцию (РРПФ) можно раскрыть на основании выражения (3. 13) следующим образом:
![]() ,
(4. 13)
,
(4. 13)
где ![]() и
и ![]() .
.
Таким образом,
передаточная функция БПР разделилась на два сомножителя. Первый из них
определяется свойствами сигнала управления ![]() ,
а второй - свойствами системы.
,
а второй - свойствами системы.
9. 5. 3. Характеристики и свойства блока разно размерных
преобразований
Рассмотрим оба сомножителя РРПФ БРП отдельно.
В первую очередь исследуем более сложный сомножитель Δсист (z,s), учитывая, что его передаточные функции числителя и знаменателя (уже не разно размерные) равны: Ф(z)=K(z,0)/[1+K(z,0)] и Ф(s)=K(s)/[1+K(s)].
![]() ,
(5. 13)
,
(5. 13)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.