Примечание: 1. Следует иметь в виду, что в таблице 3, влияние блока БРП уже учтено.
 2. Для каждого значения показателя
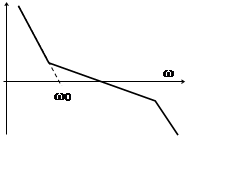
колебательности М дается своя ω0 – основная частота.
Вспомним, что это за частота (см рис. 7. 13). При синтезе аналоговых систем по
методу "динамического синтеза" В. А. Бесекерского частота ω0
могла быть выбрана произвольно.
2. Для каждого значения показателя
колебательности М дается своя ω0 – основная частота.
Вспомним, что это за частота (см рис. 7. 13). При синтезе аналоговых систем по
методу "динамического синтеза" В. А. Бесекерского частота ω0
могла быть выбрана произвольно.
Не так, однако, обстоит дело при синтезе АЦАС. Как видно из табл. 3, в этом случае, величина Wо должна быть выбрана по формуле (11. 13), и её значение связано и с величиной M и выбранным значением времени переходно го процесса τ. Рис.7. 13
.
Резюме. Подводя итоги различных вариантов и "нюансов" синтеза ДСАУ стоит сопоставить данные табл.1, табл. 2 и табл.3.,где сведены их показатели качества, с такими же показателями аналоговых (непрерывных) САУ (см . лекцию 9).Тогда будут очевидны два вывода.
1. При T<<T3 практически нет разницы в динамике моделей САУ и ДСАУ, если мало значение М. Инженеру легко установить по этим таблицам границы возможностей синтеза ДСАУ как САУ. Следовательно, устанавливаются и условия и правила наладки реальных систем.
2. Данные этих таблиц при T соизмеримом с T3 позволяют иженеру без глубоких знаний оценить основные резличия динамических показателей ДСАУ и аналоговых САУ.
На этом глава о синтезе ДСАУ и курс по теории управления дискретными системами в 2007 году был закончен. В 2008 уч. году были сделаны различные редакционные правки. В 2009 г. увеличено время весеннего семестра . Поэтому добавлена тема о финитных регуляторах и САУ.(лк. 14).
Скорректировано 07.05.08. Скорректировано повторно 22.04.09.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.